高速・高精度位置決め
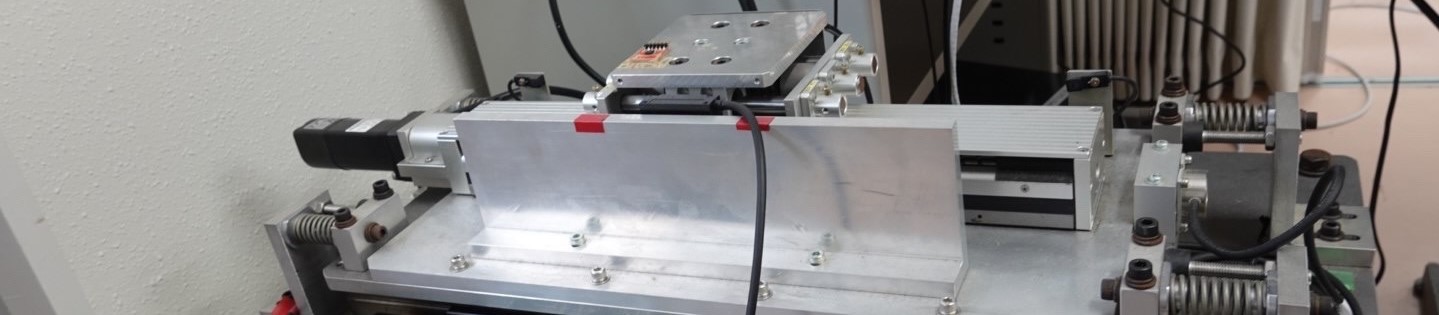
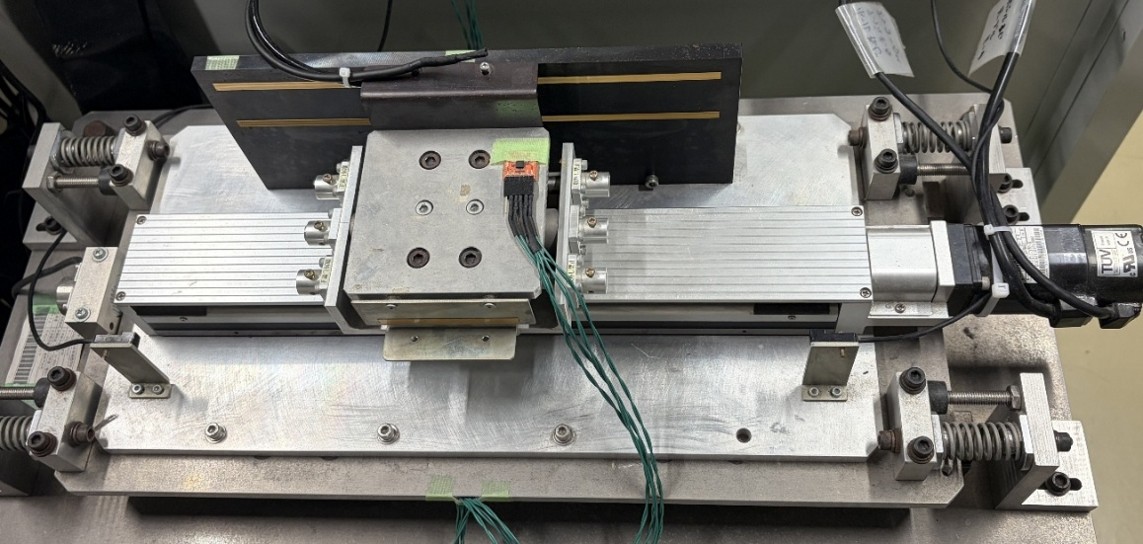
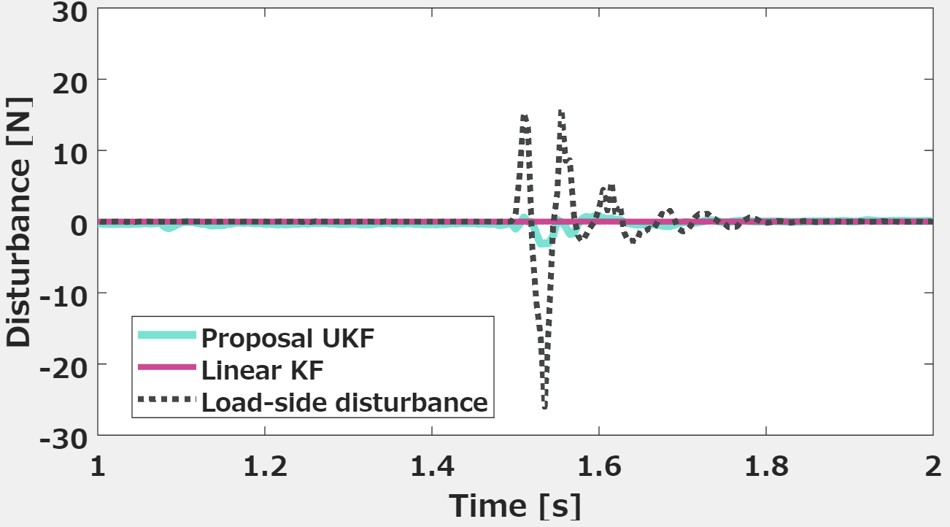
多くの産業用機械において,動力を与える駆動側と制御対象であるツールが取り付けられた負荷側は,ばねやカップリングなどの弾性要素によって接続されています。このような構造において高精度な位置決めを実現するためには,外乱要素を含めた制御対象のモデル化が不可欠です。しかし,外乱要素は非線形な特性を有しており,モデル化が難しいです。
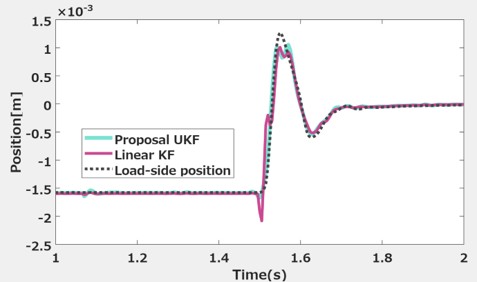
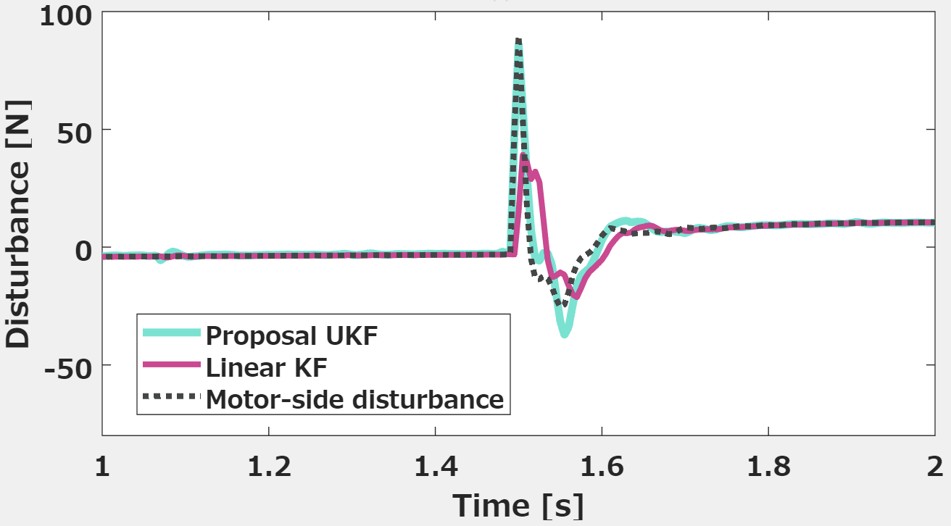
この課題に対し,非線形外乱要素を表現する機械学習モデルと線形要素を表現する線形モデルを組み合わせたハイブリッドモデルに基づいた非線形カルマンフィルタを提案しています。これにより,計算負荷の増加を抑制しつつ,外乱を含めた状態量を高精度に推定します。
高精度力制御に基づいた加工ロボット
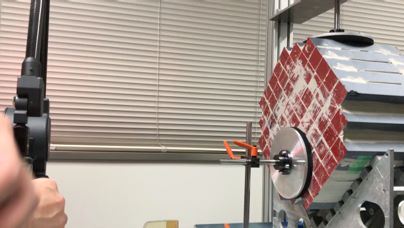
近年,バリ取り工程においてロボットによる自動化のニーズが高まっています。しかしながら,比較的安価な小型ロボットでは剛性が低いために数um単位の高精度なバリ取りを実現することが難しく課題となっています。
そこで,研磨用回転ブラシの押し付け力をVCMステージによって高精度に力制御するバリ取りロボットを開発しました。回転ブラシの押し付け力(反力)を反力推定オブザーバによって推定することにより,力覚センサ使用時より広帯域での力制御が可能となります。これにより,研磨対象の輪郭に対する高い追従性能が実現可能です。
ロボットによる熟練者作業の再現
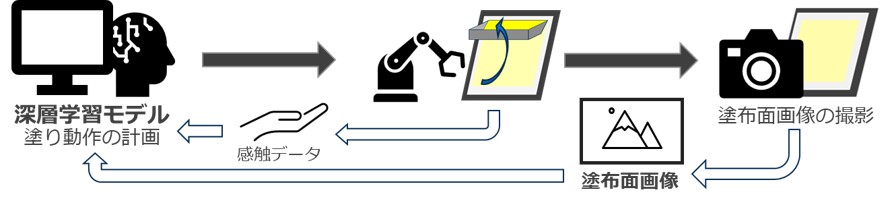
作業者による実際の塗布作業時における刷毛動作軌道を記録し,その塗布作業を産業用ロボットによって再現したいというニーズがありますが,位置指令値に基づいて動作する産業用ロボットでは作業者と同じ力加減を再現することが難しいです。そこで,繰り返し学習および機械学習により作業者と同じ力加減となるように教示データを補正する軌道補正技術の開発を行っています。
また,作業者の動作軌道を記録する作業も取り除いて完全な自動化を目指すために,現場環境を画像で認識し,その画像情報に基づいて作業者の動作軌道を疑似的に生成する深層学習モデルの開発も進めています。動作軌道の疑似生成については,職人作業の一つであるシルクスクリーン印刷の乳剤塗布(版作成)工程の自動化を目指しています。
二自由度モータの開発
今後さらなる需要が見込まれるロボットが多くの現場に導入可能なように,ロボットの小型化が重要な課題の一つとなっております。そこで,ロボットに搭載されるモータにおいてハードとソフトの両面から開発を行い,課題解決を図っています。
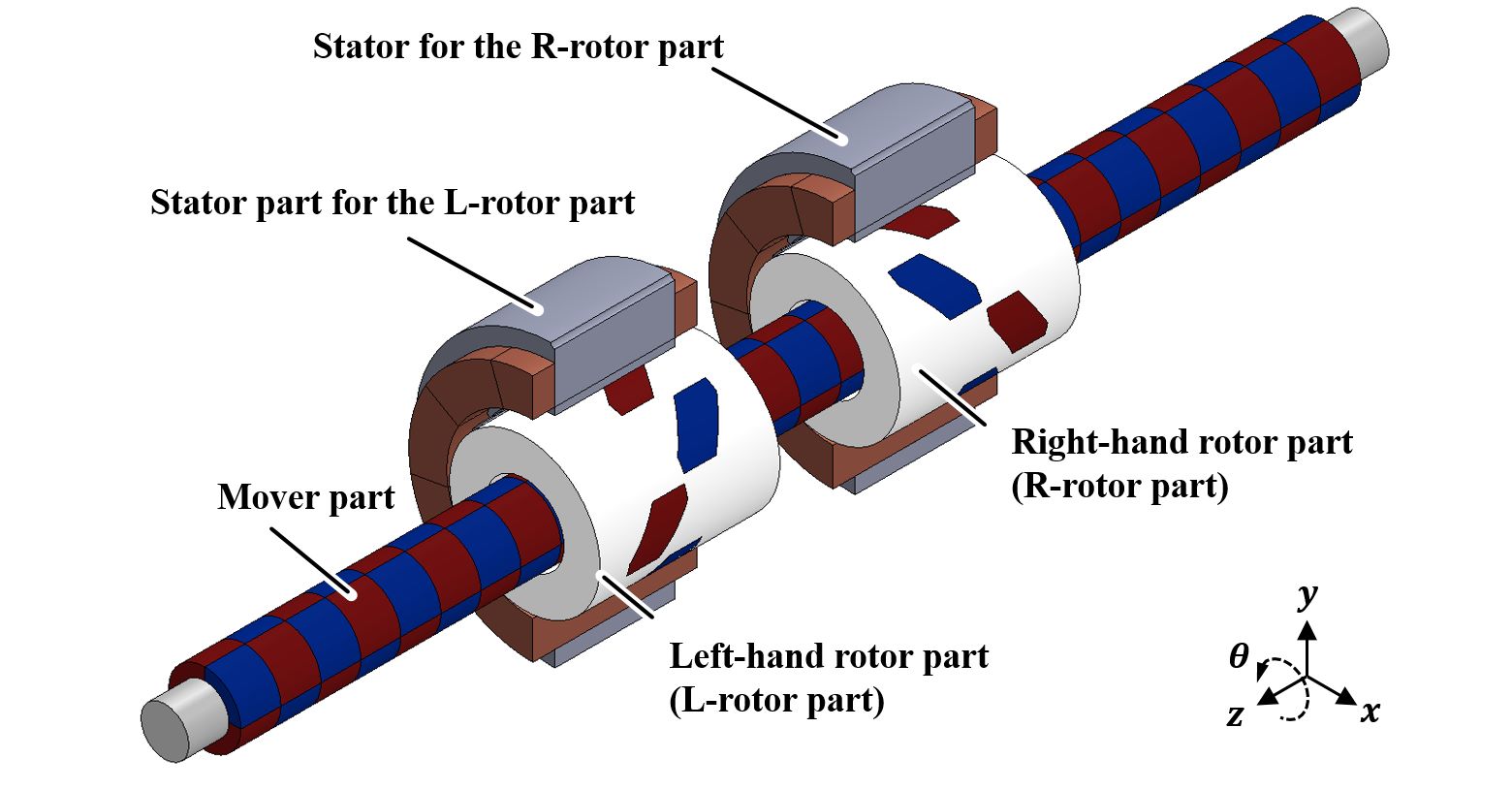
一台のモータでリニアモータ及び回転モータの動作を実現可能な二自由度モータの開発を行っています。本二自由度モータは磁気ねじ構造により高い出力発生可能であると共に摩擦が小さく,ロボットの小型化のみならず省エネルギー化に貢献可能なモータです。また,磁気ねじ構造に磁気ギアを組み合わせた磁気ギアードスクリュー構造を適用することにより,推力と共にトルクの出力向上が可能です。ソフト面では,本モータにおけるハード面の特徴を考慮したセンサレス制御の研究を行っています。これによりセンサ数を削減し,小型化及びコスト削減を実現します。
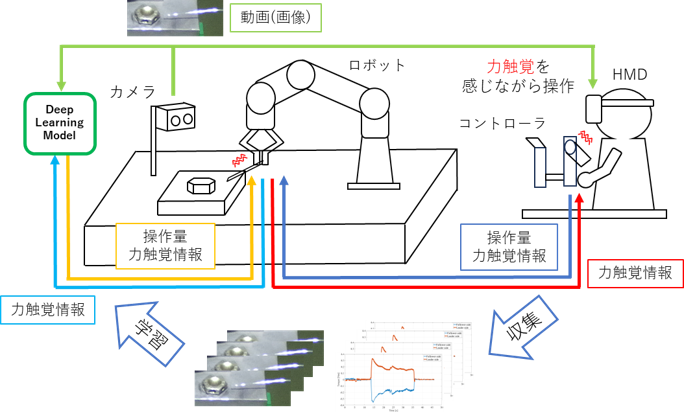
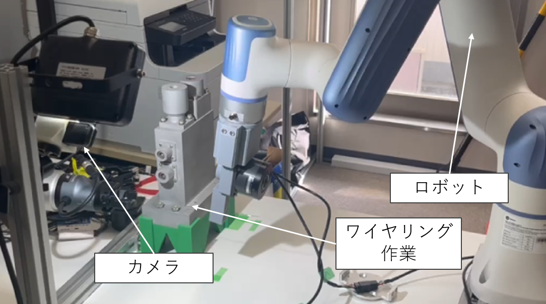
模倣学習によるワイヤリング作業の自動化
時間や労力の削減のために,生産工程において単純作業だけでなく複雑な作業の自動化に対するニーズも高まっています。しかしながら,人間は複雑な作業を行う際に〈時々刻々と変化する作業環境に応じて適切に判断し、作業する〉ことを意識せずに行っています。このような行動は、単純な繰り返し動作や教示通りの作業を行うことを得意とする機械やロボットにおいて困難を要します。
このように複雑な人作業の一つとしてボルト同士をワイヤによって繋げるワイヤリング作業があります。本研究では本学加藤研究室の協力の下,自動ワイヤリングシステムの研究開発を行っています。カメラ映像、力触覚を感じ取れるコントローラを介した遠隔操作ロボットによる作業を人が行い,その際のカメラ映像とコントローラの操作情報を学習させる模倣学習と,メカトロニクスに基づいたロボット制御の高速化によってワイヤリング作業の自動化を目指しています。
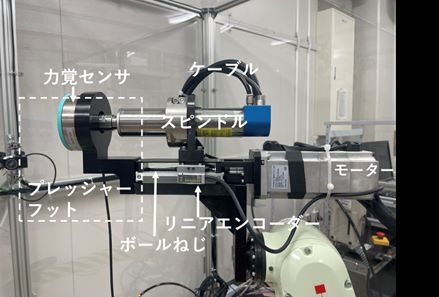
ドリルロボットによる穿孔加工
航空機の部品同士を締結するためのリベット孔は,高い加工精度が求められます。現在は大型専用機や熟練技術者によって加工されていますが,コストや汎用性の問題で産業用ロボットを用いた自動化の需要が高まっています。しかし,産業用ロボットは位置精度の低さや剛性の低さによって高精度の孔あけが難しいです。
そこで,ロボットの先端にドリルの送り動作のみを担うエンドエフェクタを搭載し,ドリルの位置やワークへの押し当て力を制御して孔あけを行い,高精度穿孔加工を実現させます。
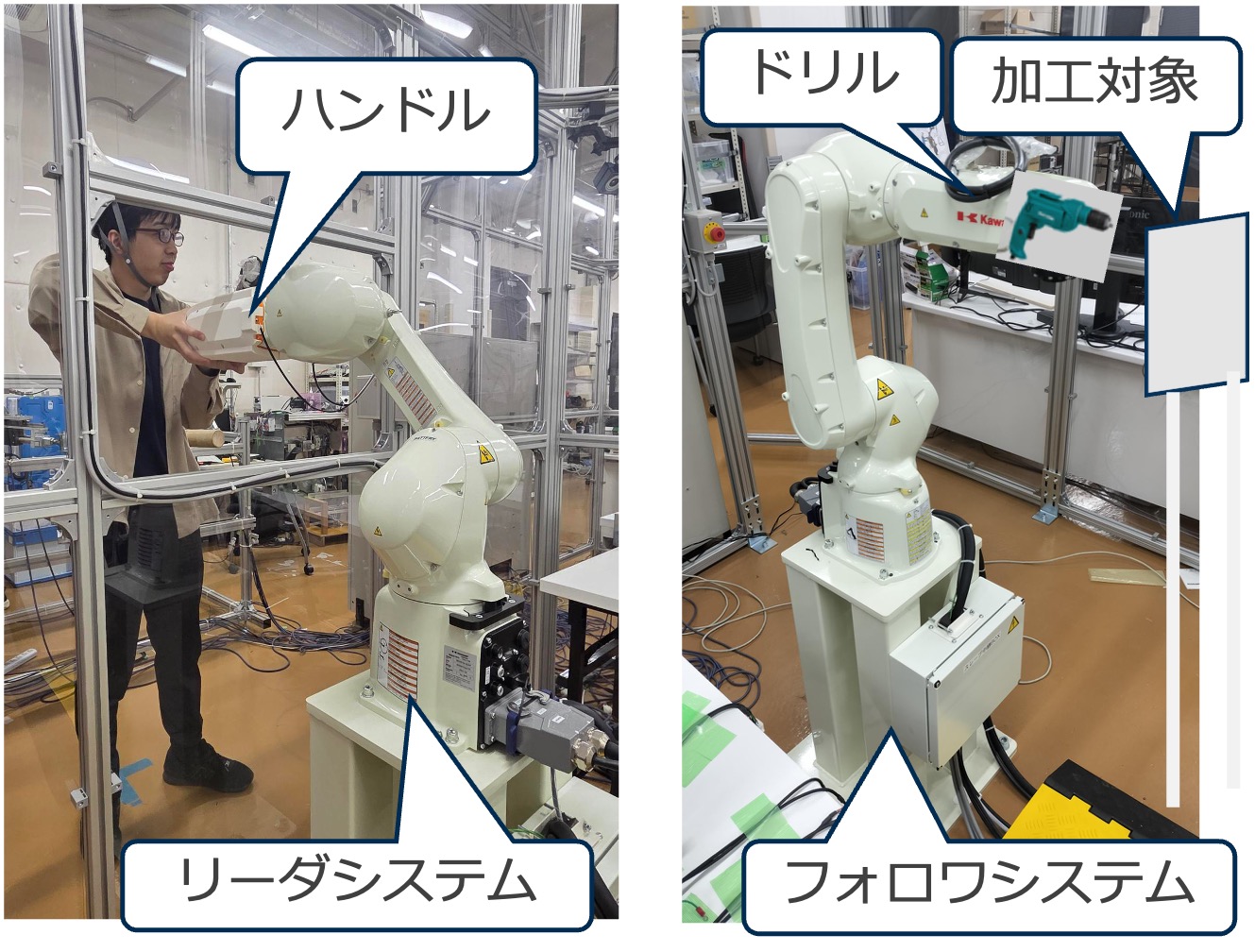
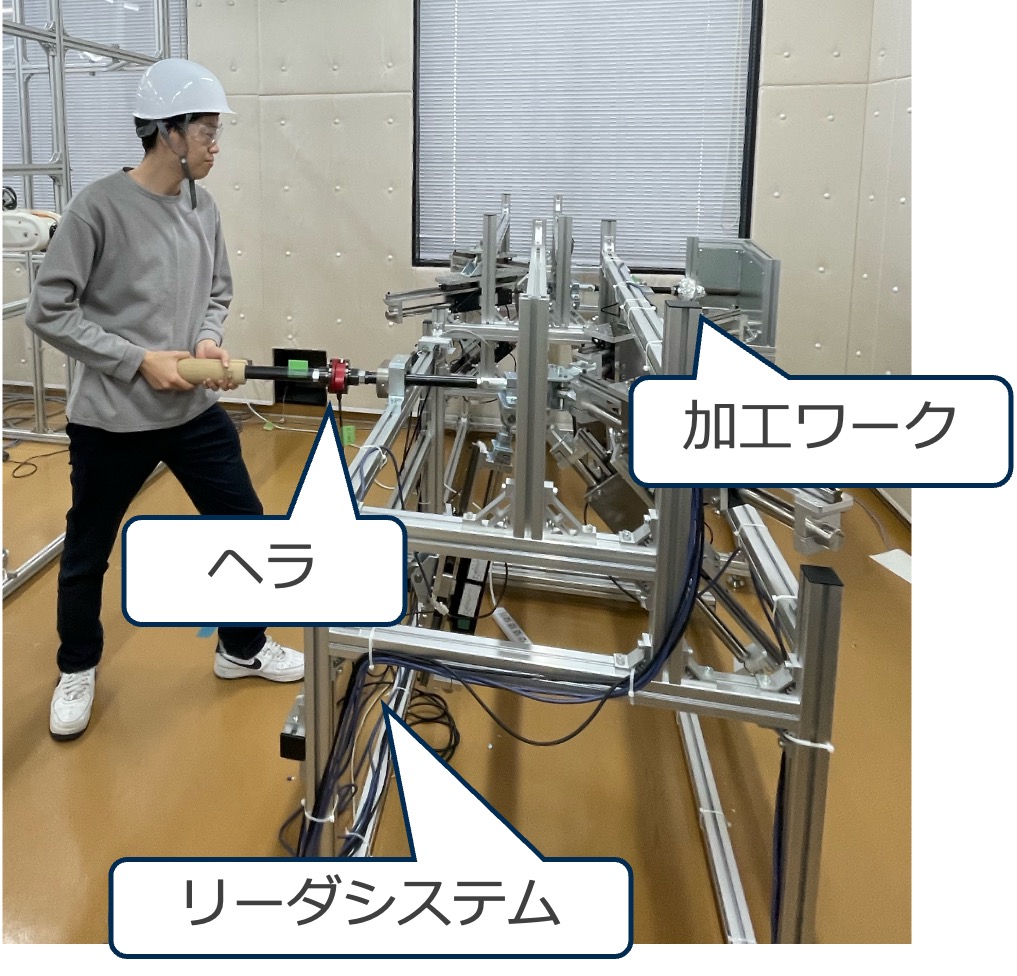
ドリル加工及びヘラ絞りにおけるバイラテラル装置
熟練技術者による職人作業は現在も製造業の重要な役割を担う一方,その技術習得までの負担・時間が大きく,技術教育の負担軽減・高効率化が求められています。そのために,職人作業を記録・解析する技術開発が進められています。
職人作業では,手先の動きだけでなく,道具を通して感じる力や振動などの力触覚情報が重要です。そこで我々は,職人作業中の動作情報とともに力触覚情報を記録・解析するバイラテラル装置の研究開発を行っています。本バイラテラル装置は遠隔操作ロボットであり,人が操作するリーダシステムと実際に作業を行うフォロワシステムの間で力触覚情報を伝達して繊細な作業を行うことができるとともに,その力触覚情報を記録することができます。現在,ドリル孔あけ作業やヘラ絞り加工を対象として研究開発を進めています。