High-Speed and High-Precision Positioning
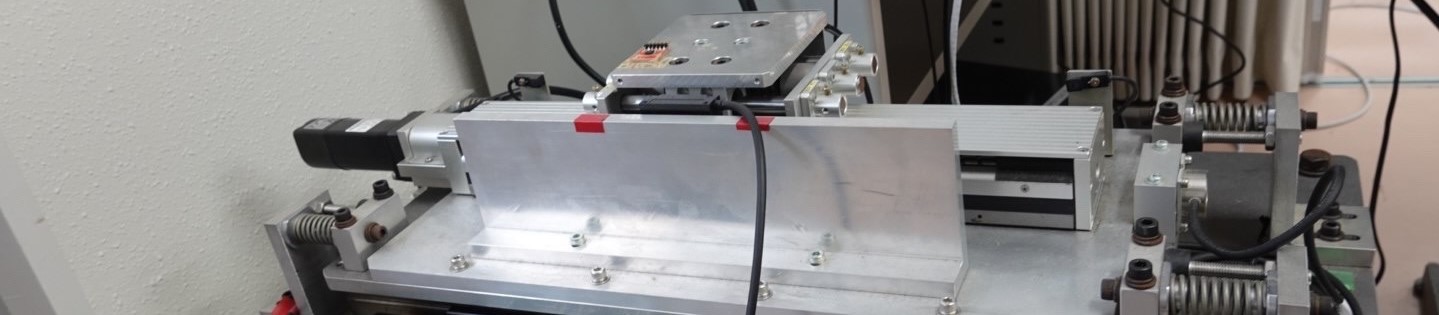
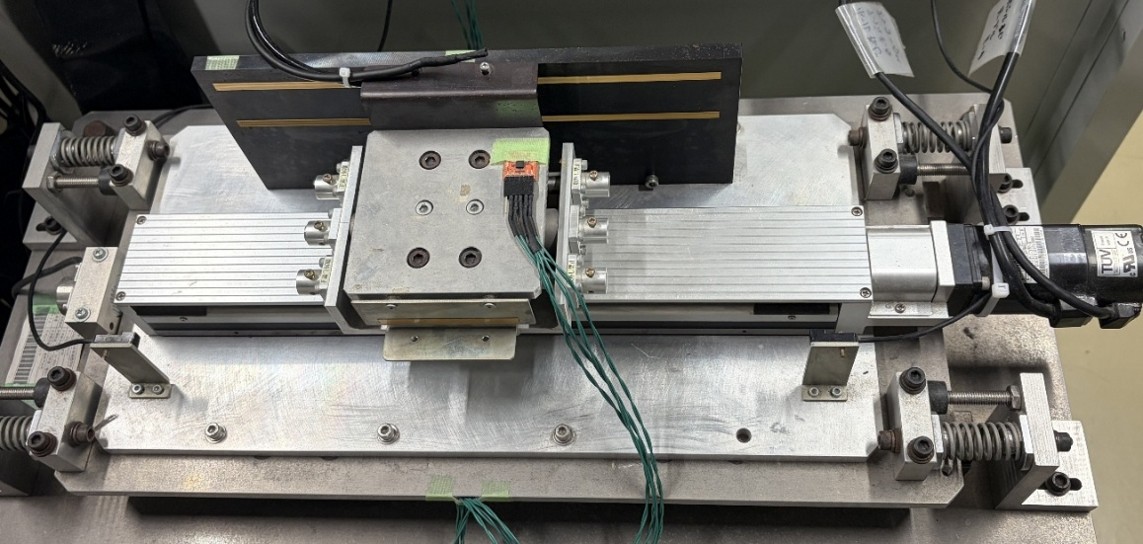
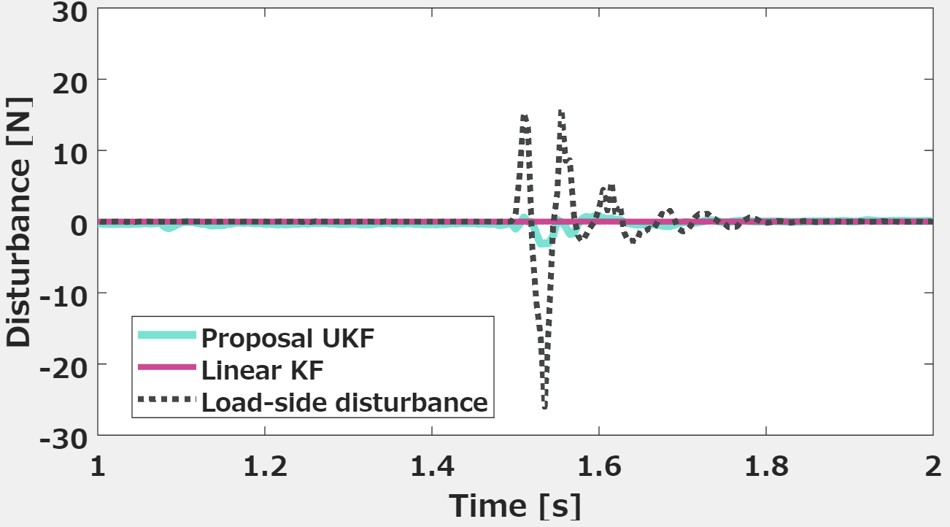
Many industrial machines consist of a motor side that provides power and a load side to which the controlled tool is attached. These two sides are typically connected through elastic elements such as springs and couplings. To achieve highly accurate positioning in such structures, modeling the controlled system, including disturbance elements, is essential. However, these disturbance elements have nonlinear characteristics, making them difficult to model.
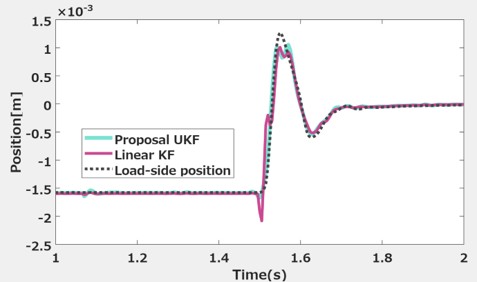
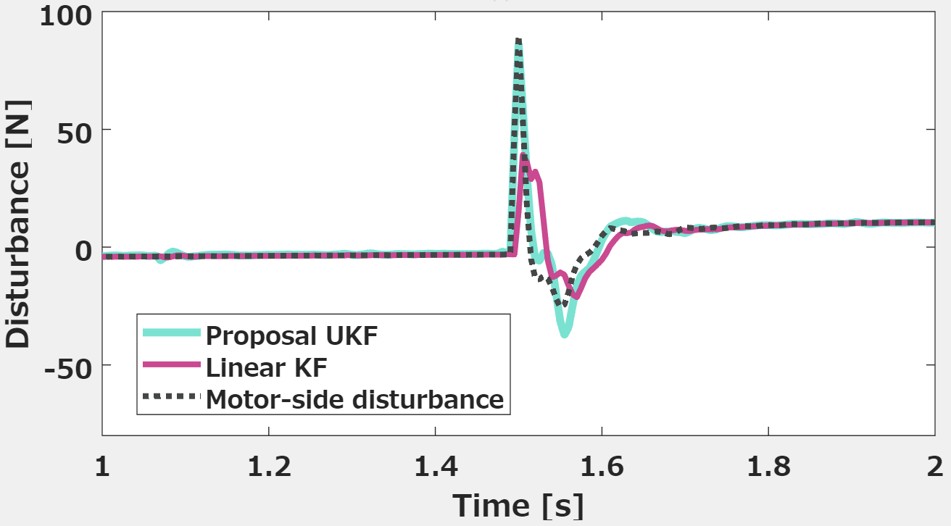
To address this issue, we propose a nonlinear Kalman filter based on a hybrid model. The hybrid model combines a machine learning model that represents nonlinear disturbance elements with a linear model that represents linear elements. This enables highly accurate estimation of state variables, including disturbances, while suppressing the increase in computational cost.
Robot Machining based on High-Precision Force Control
In recent years, there has been a growing need for robot automation in the deburring process. However, because relatively inexpensive small robots have low rigidity, it is difficult to achieve high-precision deburring in units of few micrometres.
We have developed a deburring robot using a VCM stage to precisely control the pressing force of the rotating polishing brush. By estimating the pressing force (reaction force) of the rotating brush with a reaction force estimation observer (RFOB), it is possible to control the force in a wider band than when using a force sensor. This makes it possible to achieve high followability for the contour of the object to be polished.
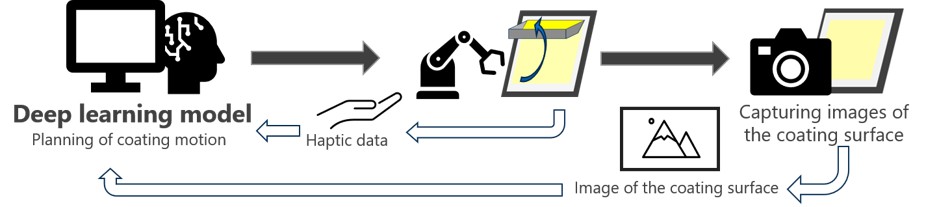
Reproduction of Precision Work by Robots
In recent years, there has been a growing need for robot automation in the deburring process. However, because relatively inexpensive small robots have low rigidity, it is difficult to achieve high-precision deburring in units of few micrometres.
We have developed a deburring robot using a VCM stage to precisely control the pressing force of the rotating polishing brush. By estimating the pressing force (reaction force) of the rotating brush with a reaction force estimation observer (RFOB), it is possible to control the force in a wider band than when using a force sensor. This makes it possible to achieve high followability for the contour of the object to be polished.
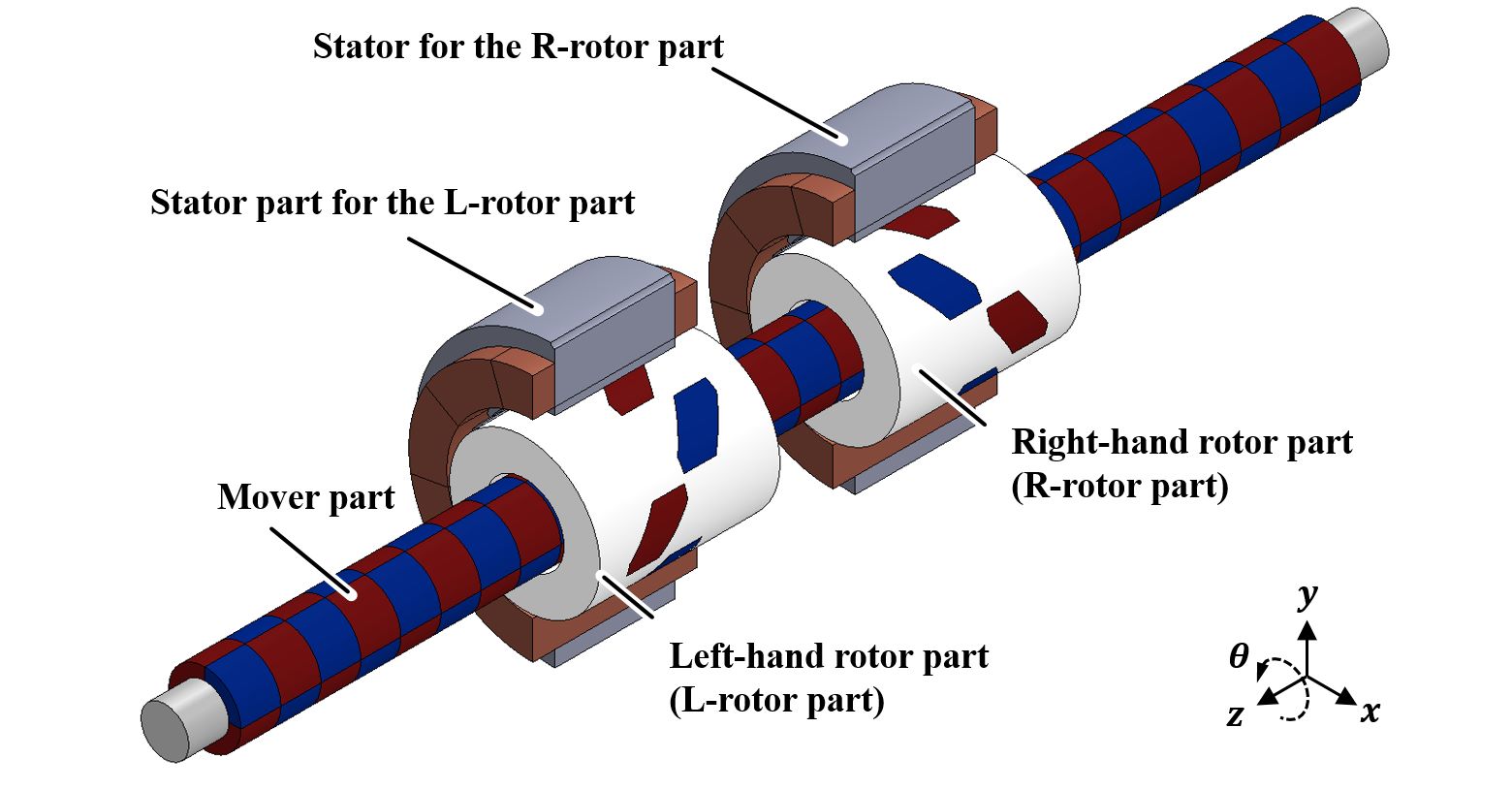
Development of Two-Degree-of-Freedom (2-DOF) Motor
As the demand for robots is expected to increase further, miniaturization has become one of the key challenges in enabling robots to be introduced into a wide range of fields. To address this challenge, we are developing motors for robots from both hardware and software perspectives.
On the hardware side, we are developing a Two-Degree-of-Freedom (2-DOF) Motor that can achieve both linear and rotational motion with a single motor. This motor employs a magnetic screw structure, which enables high output while maintaining low friction. As a result, it can contribute not only to the miniaturization of robots but also to improved energy efficiency. In addition, applying a magnetic geared screw structure, which combines a magnetic gear with the magnetic screw structure, can improve both thrust and torque.
On the software side, we are conducting research on sensorless control that takes into account the hardware characteristics of the 2-DOF motor. This approach reduces the number of sensors, achieving further miniaturization and cost reduction.
Automating Wiring Process Using Imitation Learning
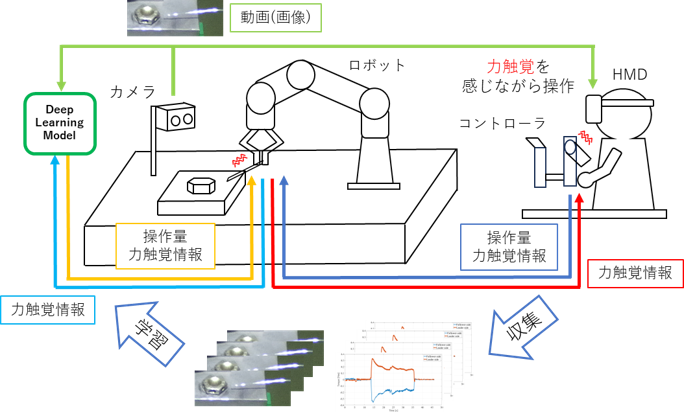
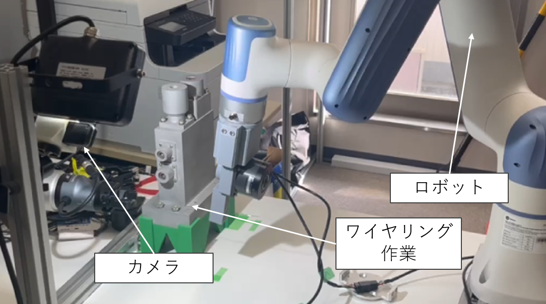
In order to reduce time and labor, there is a growing need to automate not only simple but also complex tasks in the production process. When performing complex tasks, humans subconsciously adapt their actions in response to an ever-changing work environment. However, this behavior is difficult for machines and robots, which excel at performing simple repetitive actions and taught tasks.
One of the complex tasks performed by humans is the wiring process, in which bolts are connected and secured to each other by wires. In cooperation with Kato Laboratory, we are developing an automatic wiring system.
We aim to automate the wiring process by using the following methods;
1: Imitation learning, whereby a person using a teleoperated robot and a real-time workspace image serves as the basis for the robot operation information. The robot then learns to automate the task based on both the camera image and the robot operation information.
2: Speeding up robot control based on mechatronics.
Drilling processing by industrial robots
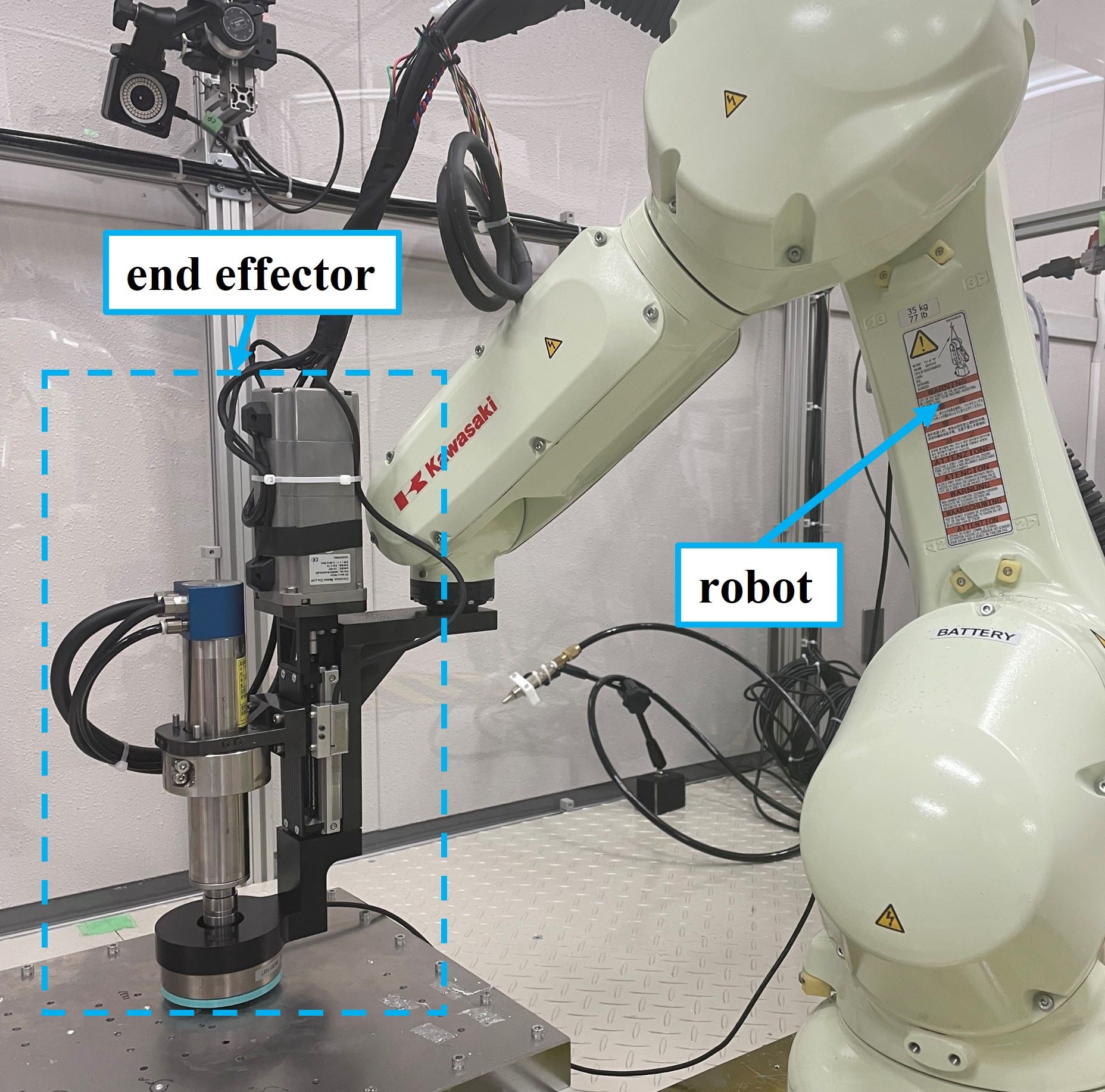
The rivet holes used to fasten aircraft parts together require high machining precision. Currently, they are processed by large dedicated machines or humans. On the other hand, the demand for automation using industrial robots is increasing to cost and versatility issues. However, high-precision drilling with industrial robots is difficult due to low positional accuracy and rigidity.
To solve this problem, an end effector with a linear actuator that handles the feed motion of the drill is mounted on the robot's tip. By controlling the position of the drill and the pressing force on the workpiece with the end effector, it can perform a high-precision drilling process.
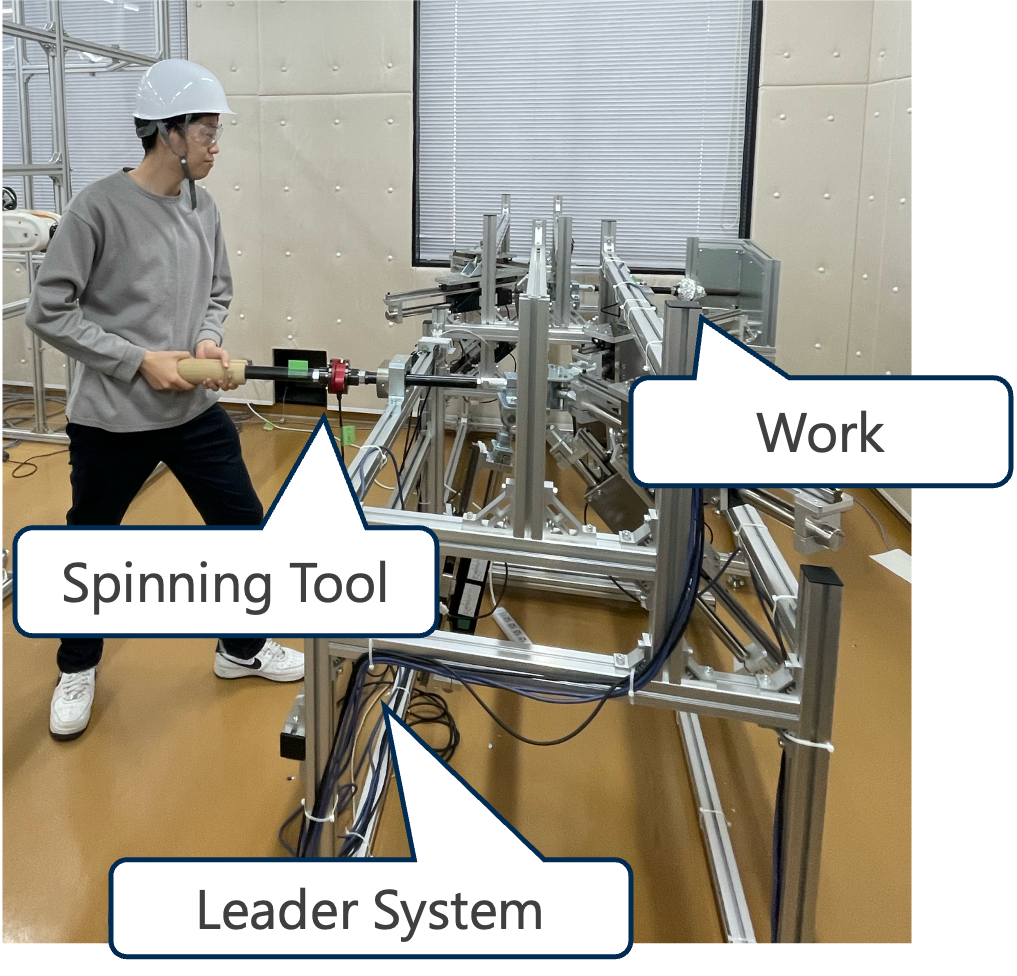
Bilateral Systems for Drilling and Metal Spinning Process
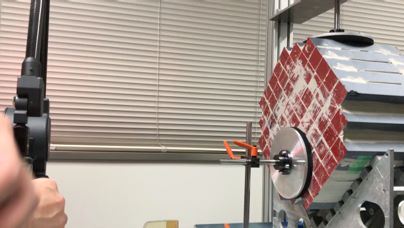
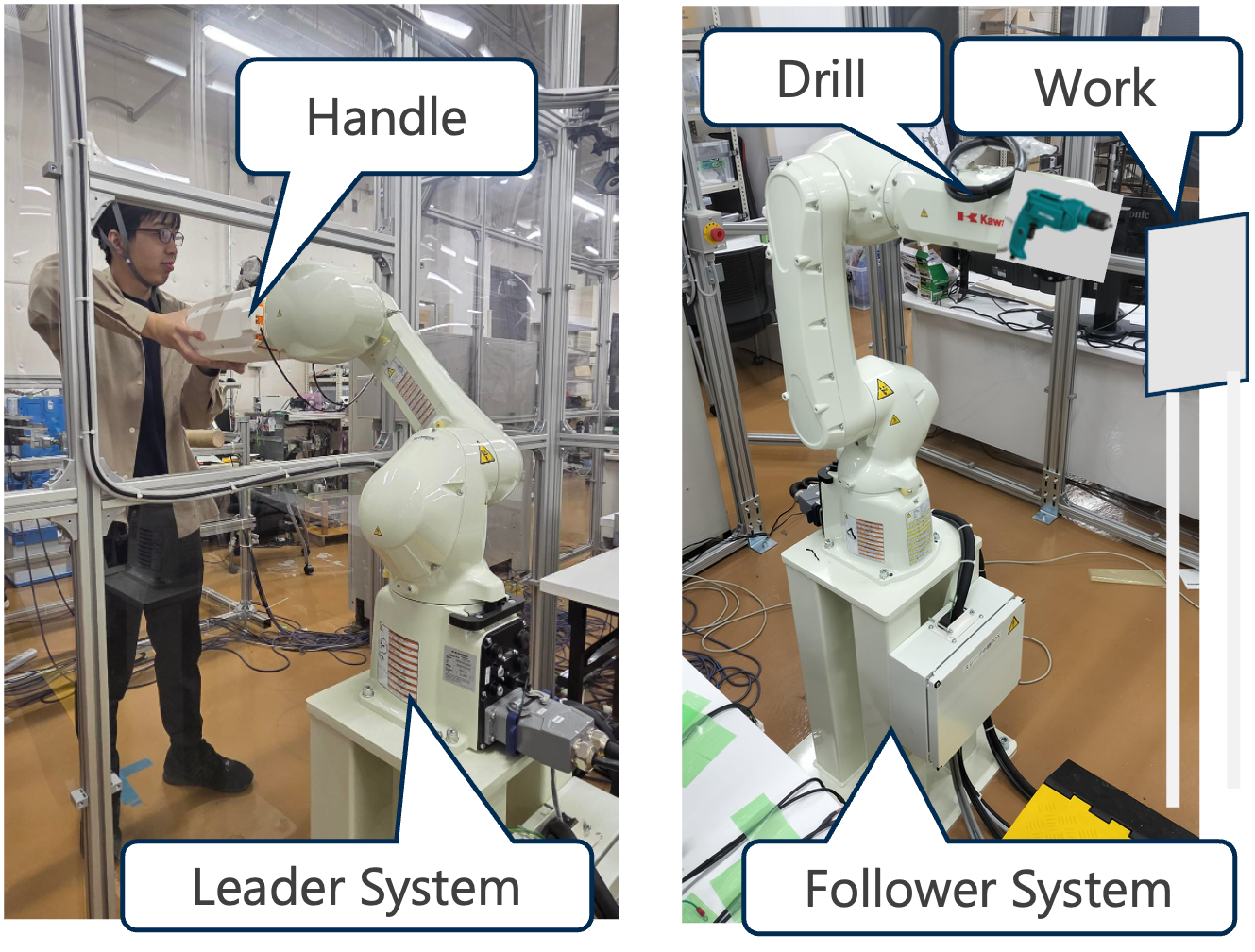
While craftsmanship by skilled technicians continues to play a vital role in the manufacturing industry, the significant time and burden required to acquire these skills have created an urgent need for more efficient and less burdensome technical education. To address this, technological developments are underway to record and analyze expert operations.
In craftsmanship, haptic information—such as the tactile sensations of force and vibration felt through tools—is just as crucial as hand movements. Therefore, we are researching and developing a bilateral system that records and analyzes both motion and haptic data during expert operations. This bilateral system is a teleoperated robot that enables delicate tasks by transmitting haptic information between a leader system operated by a human and a follower system that performs the actual work, while simultaneously recording the haptic data. Currently, our research and development focuses on drilling and metal spinning processes.