
八田 禎之
岐阜大学 工学部 機械工学科 知能機械コース 助教
近年,様々な分野においてロボットが普及されつつありますが,ロボットの導入が難しい場面がまだ多く残っています。特に細やかな力加減を必要とする作業は現在のロボットが不得意とするものです。人間と同様に細やかな力加減を実現するため,以下の研究を行っています。


八田 禎之
岐阜大学 工学部 機械工学科 知能機械コース 助教
近年,様々な分野においてロボットが普及されつつありますが,ロボットの導入が難しい場面がまだ多く残っています。特に細やかな力加減を必要とする作業は現在のロボットが不得意とするものです。人間と同様に細やかな力加減を実現するため,以下の研究を行っています。
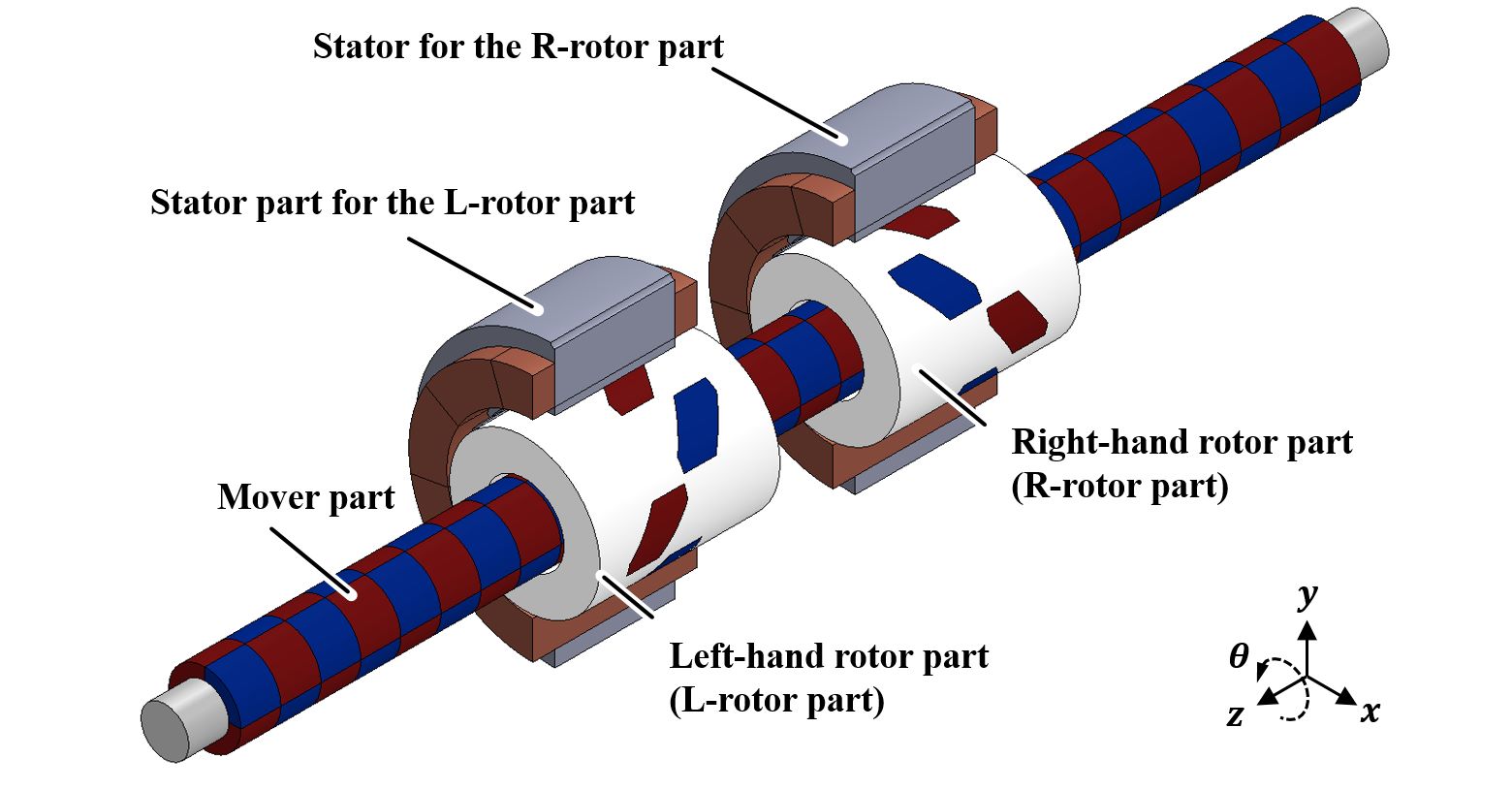
今後さらなる需要が見込まれるロボットが多くの現場に導入可能なように,ロボットの小型化が重要な課題の一つとなっております。そこで,一台のモータでリニアモータ及び回転モータの動作を実現可能な二自由度モータの開発を行っています。また,本二自由度モータは磁気ねじ構造により高い出力発生が可能であると共に摩擦が小さく,ロボットの小型化のみならず省エネルギー化に貢献可能なモータです。
モータ・アクチュエータは,ロボットだけでなく工作機械や家電製品など様々な製品に用いられております。モータ・アクチュエータに関する困り事がございましたら,気兼ねなくご相談ください。

動画(YouTube)
人間の動作をロボットによって自動化するためには,まずはその動作を保存して解析する必要があります。人動作の保存・解析において有効な手段の一つに遠隔操作ロボットの一種であるバイラテラル制御システムがあります。現在,高度な職人技術が要求される加工技術の一種であるヘラ絞り加工のためのバイラテラル制御システムを開発し,その加工時の細やかな力加減やツールの動きの保存・解析を進めています。
ヘラ絞りとは(外部サイト)
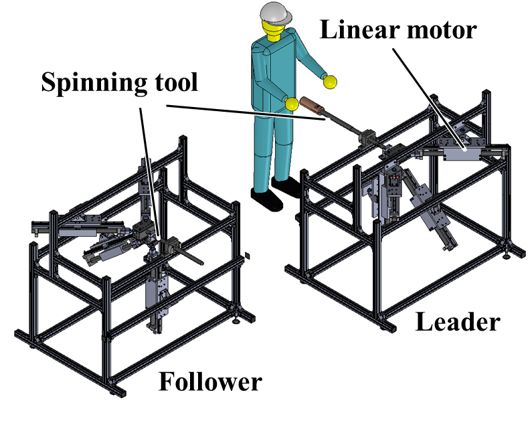
上記バイラテラル制御システムは同時に位置制御と力制御を実現させることにより,フォロワシステムが環境に接触した際の感触をリーダシステムを介して操作者に感じさせることができる。パラレルリンクによって構成されるヘラ絞り用バイラテラル制御システムでは,力制御を実現するためにリアルタイムに順運動学を計算する必要がある。しかしながら,パラレルリンクロボットの順運動学は一般的に導出することができない。そこで,ロボット工学,制御工学,AIを組み合わせることにより,パラレルリンクロボットの順運動学問題を解決します。