Development of motor and actuators
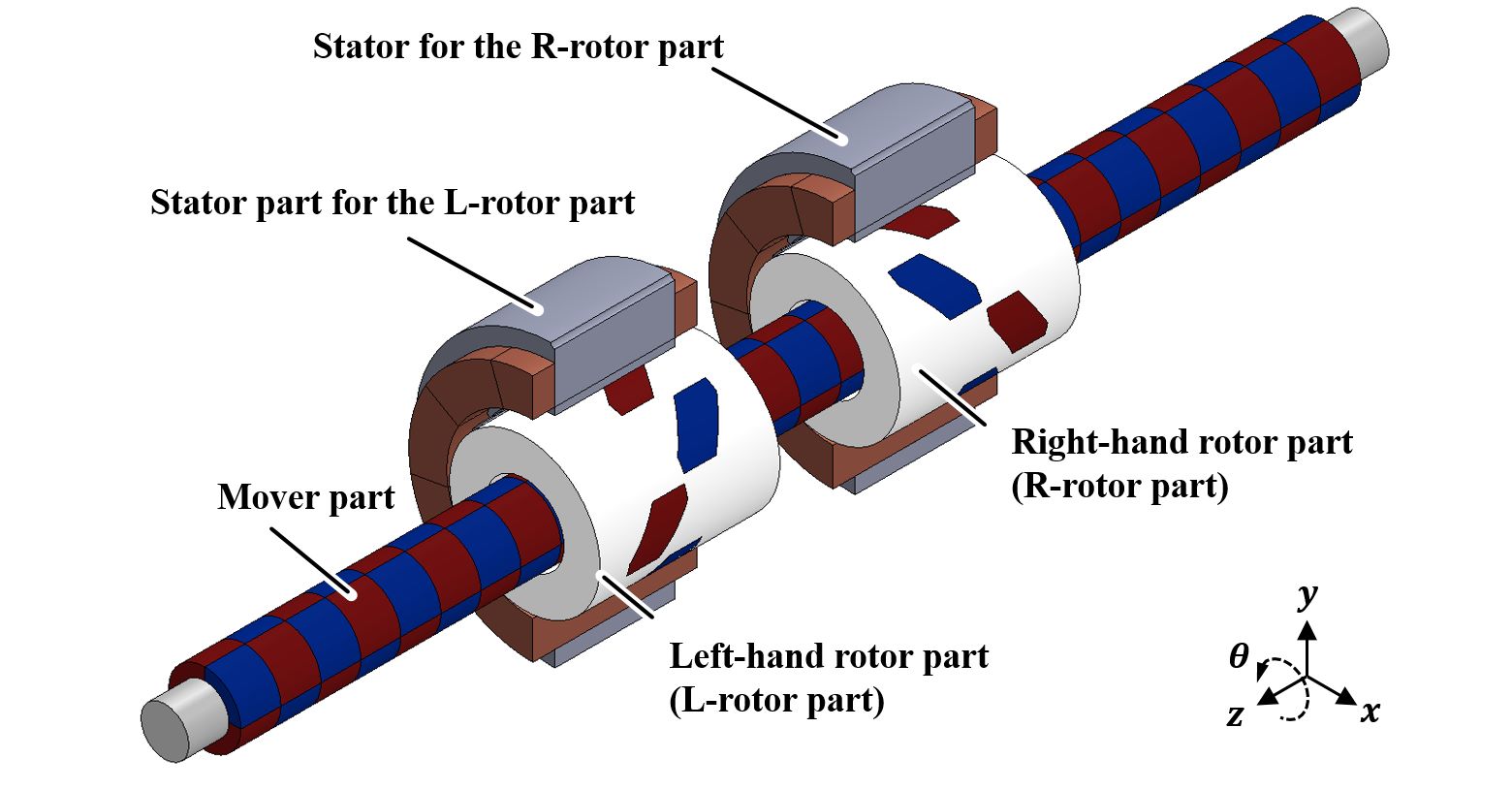
In order to make it possible to introduce robots into many different fields where further demand is anticipated, downsizing of robots has become one of the important challenges. Therefore, we are currently developing a two-degree-of-freedom motor capable of operating both linear and rotational motors with a single motor unit. Furthermore, this two-degree-of-freedom motor, using a magnetic screw structure, not only offers high output but also reduces friction, making it a motor that can contribute not only to downsizing robots but also to energy conservation.
Motors and actuators are used in various products, not only in robots but also in industrial machines and household appliances. If you have any concerns or issues related to motors and actuators, please feel free to consult with us.

動画(YouTube)
Research on force control of parallel link robots
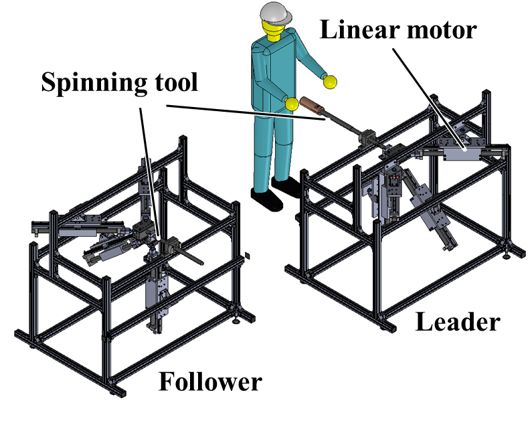
The bilateral control system, which simultaneously realizes position control and force control, allows the operator to feel the sensation through the leader system when the follower system comes into contact with the environment. In the bilateral control system designed for the metal spinning process, which consists of parallel links, real-time forward kinematics calculations are necessary to achieve the force control. However, deriving the forward kinematics for parallel link robots is generally impossible. Therefore, by combining the fields of robotics, control engineering, and AI, we aim to solve the forward kinematics problem for parallel link robots.