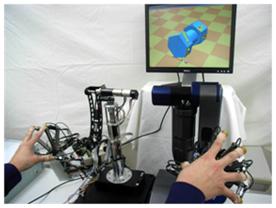
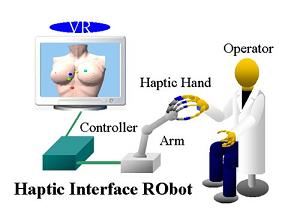
Haptic Interface
The Virtual Reality (VR) technology has spread in many fields. For example, the VR can be used in the training system of the special techniques such as the surgery and the diacritic of the medical field. Here, in the interaction between the human being and VR environment, the haptic interface that presents the tactile feeling to the operator’s fingertips is needed. In this laboratory, we have developed the haptic interface which has the following features:
- Safe operation,
- A wide space of working area,
- Representatives of any direction force at the contact points and the weight of the virtual objects,
- Suppression of any oppressive feeling when the system attached to the human and the weight of the system.
Collision avoidance control for multi-fingered bimanual haptic interface
To present three-directional force at ten fingertips of both human hands, we previously developed a multi-fingered bimanual haptic interface system. However, there is a risk that haptic hands and interface arm will collide while a user is manipulating the haptic interface. To alleviate this risk, we propose a collision avoidance control law of the multi-fingerd bimanual haptic interface system.

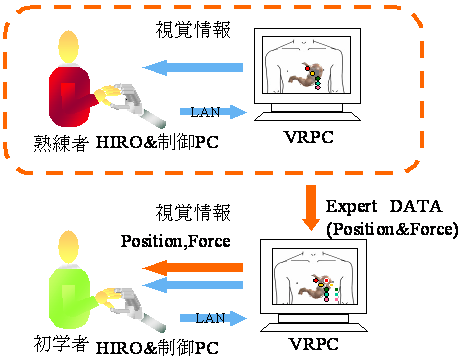
A method to transfer hand skill
We are researching a method to transfer expert's skill to beginner by using a robot, which have five fingers to get and give forces. In this research, we are using two kind of forces to transfer; one is saved expert's force (Fe) and another is reaction force (Fb). Beginner's forces are transferred expert's force by presentation alternately (Fe, Fb). Also, we show alpha-blended expert's hand image mixed with the beginners position to transfer postural information.
|
|
|
| (a) Transfer Method of the Position | (b) Transfer Method of the Force |
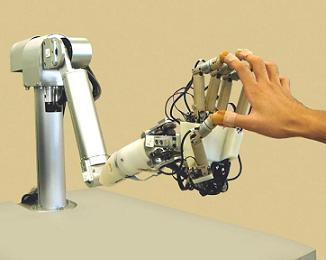
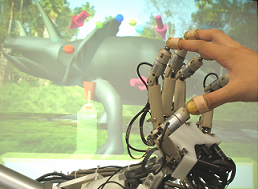
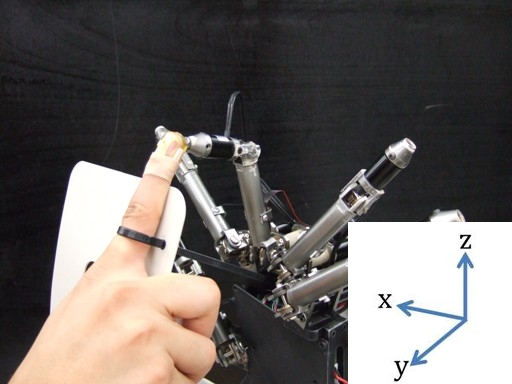
Five-Fingered Haptic Interface Robot
Five-Fingered Haptic Interface Robot (HIRO) consists of a five-fingered haptic hand and an interface arm. A user connects his/her five fingertips to HIRO through passive spherical permanent magnet joints. Through haptic fingers, HIRO can represent any directional force and tactile feeling at the five fingertips of human hand. Now we have developed and researched five-fingered haptic interface robot HIRO III.
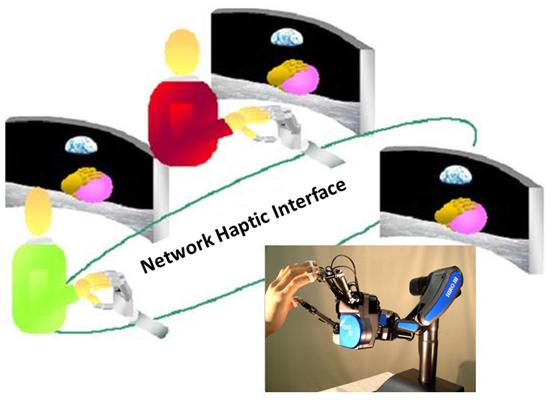
The research of Network Haptic Interface
Background and Purpose of the research
Haptics communication is one of the great issues in the next-generation communications. Establishing the network haptic interface technology that can present force and tactile feeling to human fingers and palm provides applications in various areas such as telemanipulation of humanoid robot, 3D CAD with tactile technology for manufacturing, diagnosis and transmission of experienced operator’s skill, palpation training system in medical education, medical tele-treatment and tele-care in welfare.
Contents of the research
The multi-fingered haptic interface consists of arm mechanism, hand mechanism, controller, and interface software. So, we have developed the components for establishing the haptic interface network, including the optimal design method of the multi-fingered haptic interface, the redundant force control taking human sensitivity into consideration, the wire saving control system using FPGA, the haptics shared technology between remote places, and the haptics virtual reality technology on industry-academia-government collaboration between university and companies.
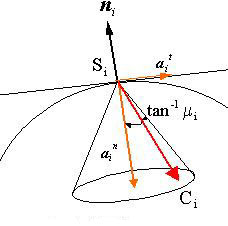
When we operate a virtual object by fingers in a virtual environment, the space motion of the object is caused by the contact force between fingers and the object. The force consists of a constraint and a frictional force. The constraint force is calculated from the penetration depth of a fingertip touching an object. The frictional force on a plane of contact is calculated from the constraint force. The frictional force has two statuses which are the static and dynamic frictional forces. We use the friction cone algorithm for switching between the static and dynamic. In this algorithm, if a fingertip position is in the cone, the friction is static, if not, it is dynamic. Moreover, we propose the calculation method of friction moment, which is caused by the change of the object's orientation. In this research, we develop the physical simulation for presenting the force by using the haptic interface.
|
|
| Friction cone | Simulation |
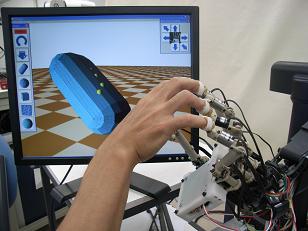
This is a demonstration program of haptic rendering with HIRO.
This file is a zip file. After decompression, run HIRO_Demonstration.exe in the extracted folder.
For details, please refer to manuals (Japanese only).
HIRO_Demonstration_ver1.0.zip[2.33MB]
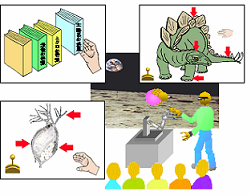
Future Science Encyclopedia
Generally, the encyclopedia could present only the visual or auditory information. However, now we can perceive the other attributes of the objects such as weight and touch sensation in Future Science Encyclopedia based on a combination of VR(Virtual Reality) and Multi-fingered haptic interface robot that can present tactile feeling to all fingers of human hand.
|
|
| Future Science Encyclopedia | Operation by HIRO |
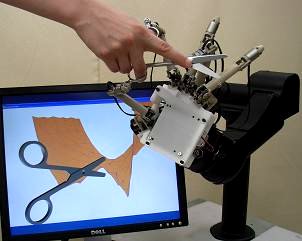
Several tool-type haptic interfaces
Several tool-type haptic interfaces have been developed, for example, surgical knife, scissors, and syringe type haptic interfaces. However, each single tool-type device presents only the operating haptic feeling of that tool-device. A presentation of force feelings of multi surgical tools requires many single tool-type haptic interfaces. This results in the requirement of an installation location and a great deal of cost. For this reason, we have developed tool-devices (surgical knife, scissors, and syringe), which can be equipped with the multi-fingered haptic interface robot (HIRO). These devices can be attached to HIRO and removed from HIRO easily, so it is not necessary to provide every single tool-type interface for each device.
 |
 |
| Scissors device | Other devices |
Skill transmission system
In the medical fields, the expert skills including surgical techniques, palpation techniques and so on, are obtained by long-term training. Especially, the skill can be acquired by interacting with the patients. However, it is difficult for the medical students to train directly with the patient because of a decreasing in volunteer who cooperates in the training and the danger of medical error. Then, the skill transfer system using the constructed human body model in virtual space and Multi-Fingered Haptic Interface Robot (HIRO) is developed in this laboratory. For the skill transfer system using VR and the haptic interface, the following features are feasible: the movement of the trainer’s hand and the operation of the trainer’s force can be recorded; then, this accurate information can be transmitted and presented to the trainee by the screen and the haptic interface at the trainee’s side.
The perception measurement using HIRO
In order to design and develop the skill transfer system in which the operation of the trainer’s force is presented to the trainee, it is necessary to investigate and clarify the human perception of the force which
is presented by the haptic interface. In particular, it is important to consider the transfer method based on the human perception.
The force that the human being operates by the hands can be expressed by the direction vector and the magnitude. Therefore, we investigate the perception of the force direction concerning the space variation and the presentation time variation. In particular, for the measurement of the perception ability of the force direction, we examine two kinds of errors, i.e. the absolute angular error and the relative angular error. Then we improve the skill transfer method for the multi finger based on the investigation of the perception.
The Dynamics-based Haptic Interface Control
Haptic Interface demands the high accuracy force response and the precise following movement. In this report, we aimed to upgrade HIRO, which is a type of Haptic Interface, from the viewpoint of control. The proposed control method is added to the existing control method as the dynamic compensation term. The dynamic compensation term is calculated with Newton Euler method. As a result, the proposed control law provides the better performance compared to the former control system.
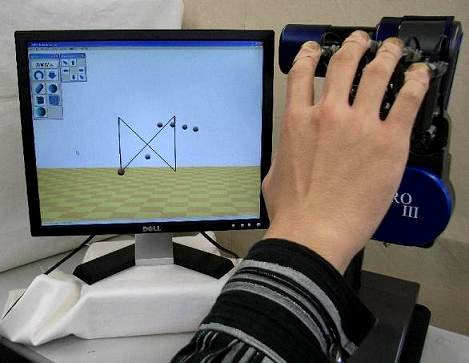
Bimanual HIRO system
For doing our daily life activities, we usually use both hands. When the width of the working area of the VR environment is extended for using both hands, the number of activities in the VR environment also can be increased. Especially, in order to perform elaborate tasks with both hands in the VR environment, it is necessary to present any directional high-precision force at the fingertips. Then, in the present study, two HIRO III systems that can present three-dimensional force to five human fingertips are used for constructing the bimanual HIRO system, which allows both hands to work in the VR environment. In addition, we then investigate the validity of the bimanual HIRO system.