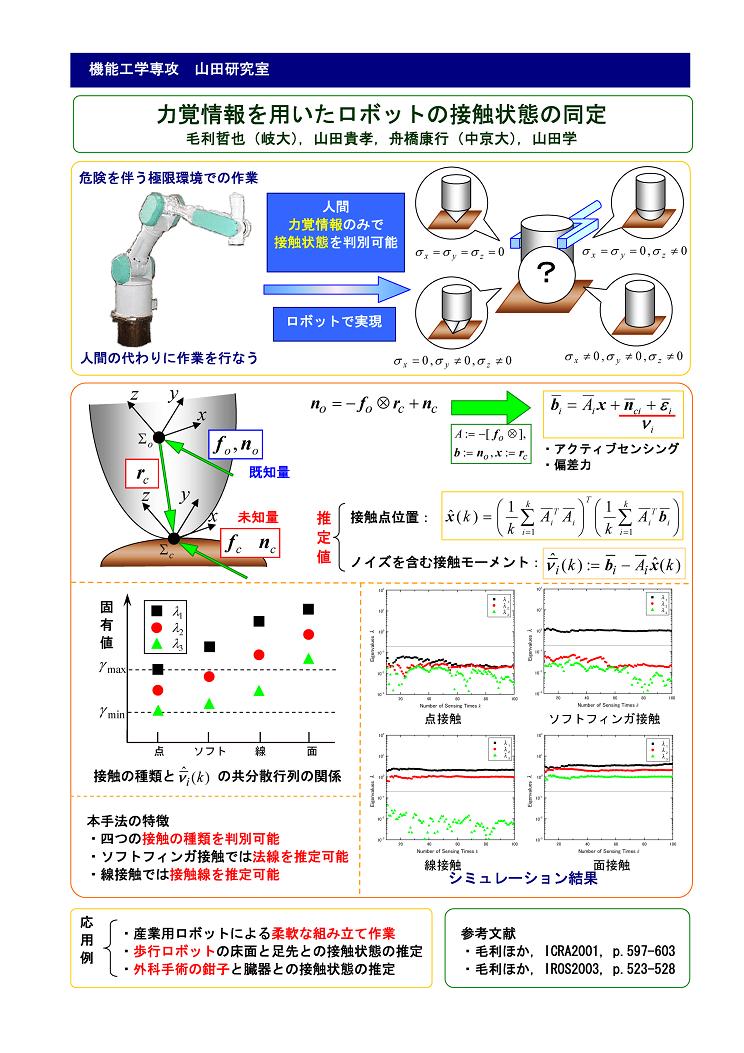
ロボットの接触状態の同定に関する研究
人間は手先の感覚を用いて,把持対象物と環境との接触状態を認識し,柔軟に作業を遂行することができます.6軸力センサ,視覚センサ(カメラ)等の各種センサを用いて,接触状態を間接的に推定する手法を構築し,ロボットによる器用な作業を目指します.


日本機械学会東海支部講演会(2008/03/10-11)
 Techno_Fair_2007
Techno_Fair_2007
 RSJ2007発表資料:力覚情報を用いたロボットの接触状態の同定 -接触状態の遷移判定-
RSJ2007発表資料:力覚情報を用いたロボットの接触状態の同定 -接触状態の遷移判定-
 IROS2003発表資料:Identification of Contact Conditions from Position and Velocity Information
IROS2003発表資料:Identification of Contact Conditions from Position and Velocity Information
 RSJ2002発表資料:速度情報を用いた接触状態の同定
RSJ2002発表資料:速度情報を用いた接触状態の同定
 PDF資料
PDF資料