
VRロボット教示
本研究は,遠隔地にある人間型ロボットハンドシステムへの複雑作業の教示を目指しています.
従来の教示方法であるロボット・プログラミングやダイレクト・ティーチング・プレイバックは,同時に多点で位置と力の情報が必要な人間型ロボットへの適用は難しく,またマスタ・スレーブによる教示方法では,スレーブ側が遠隔地にあることを考えると通信による時間遅れの影響で制御が困難であるということ及び教示者は失敗が許されないため作業中強い緊張を強いられるということから好ましくありません.そこで当研究室では,VR環境で作業を行う人間の一連の操作から解析される動作意図を基にロボット教示コマンドを生成するシステムを構築しました.
<<システム構成図はこちらへ>>
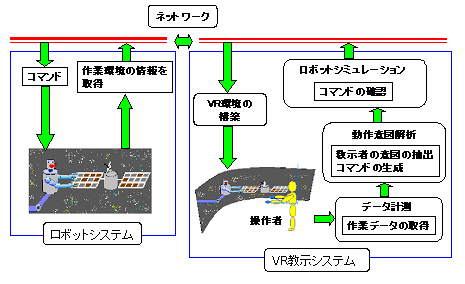{kind=link}
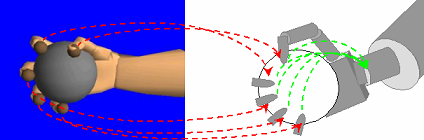
ヒューマンシミュレーション
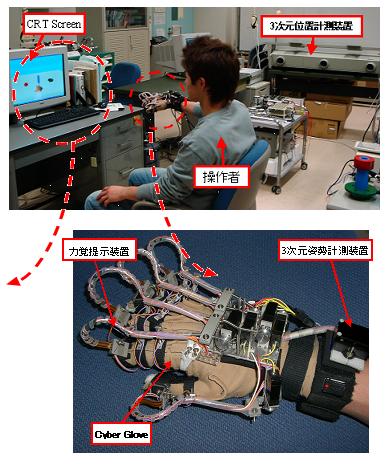
教示者はこの仮想の作業空間内でロボットに教示したい作業を実演します.
教示者には,パソコンの画面を通して視覚情報が,力覚提示装置(FFG)を通して力覚情報が提示されます.
また教示者の運動は3次元位置計測装置やデータグローブ(Cyber Glove)などで計測されヒューマンシミュレーションに反映されます.
その際,作業データとして指先位置,指先力,手首位置姿勢,物体位置姿勢などを保存します.
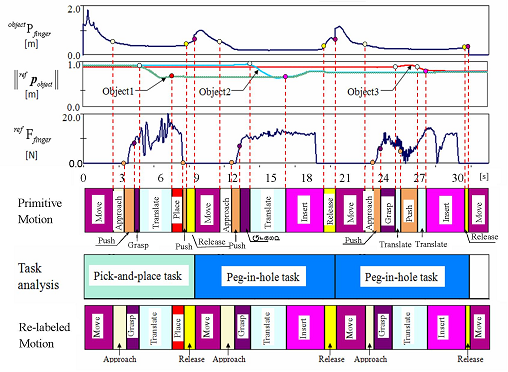
動作意図解析
教示に必要なデータである教示者の意図を抽出します.ただし,複数の物体による組立作業のような複雑な作業の場合,操作者の意図が広範囲であるため,一連の作業から一括して意図を抽出することは困難です.そこで,一連の作業を基本動作に分割し,その基本動作ごとに意図を解析します.
方法として,上述のヒューマンシミュレーションで取得した作業データから条件判定により基本動作に分割します.次に,それぞれの動作の前後関係,指先位置,物体位置姿勢からさらに操作者の意図に則して再分割または統合します.またロボットシステムでは,分割した基本動作ごとに操作者の手の速度の極値点を求め,これら基本動作の始点,終点,極値点の目標値により,教示データを構築します.これら目標値の間を近似し滑らかな曲線で目標値を構築することによりデータ量の削減ができ,かつ操作者の意図を反映した滑らかな軌道が生成できます.
コマンド生成
ロボットシステムに送るロボット教示コマンドは物体位置・姿勢,指先位置,指先力で構成します.ただし,実環境と仮想環境の誤差を吸収するため,指先位置は物体座標系とします.
ここで,操作者がVR 空間で操作する仮想ハンドと実際に作業をするGifu Hand IIIとの幾何学的形状,運動機能の相違を考慮し,最適なロボットハンドの位置・姿勢を自動で探索する処理を行います.
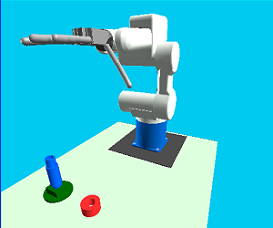
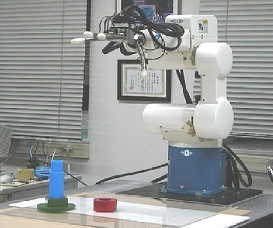
シミュレーションと実ロボットによる作業
シミュレーションにより生成したコマンドを確認し,
作業がうまく完遂できていることを確認した後,実ロボットに作業を行わせます.
(アニメーションにJavaScriptを用いています)
|
|
| ロボットシミュレーション | 実際のロボット |
複雑タスクを対象とした動作意図解析によるバーチャル教示の研究
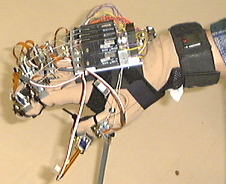
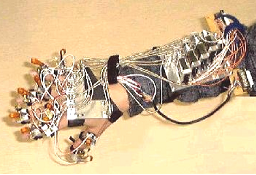
重量が390[g]あり,アクチュエータ部分が重く長時間使用するのは困難でした.また,拇指の屈曲方向と仮想反力方向が異なることや指先部の機構が絡まるという機構面での問題点があり,さらに指先の機構がワイヤ及びセンサケーブルのみでつながっているため,着脱が容易ではなく,メンテナンス性が悪いという面においても問題を残しました.
FFG Ver.1
ロボットシステムに送るロボット教示コマンドは物体位置・姿勢,指先位置,指先力で構成します.ただし,実環境と仮想環境の誤差を吸収するため,指先位置は物体座標系とします.
ここで,操作者がVR 空間で操作する仮想ハンドと実際に作業をするGifu Hand IIIとの幾何学的形状,運動機能の相違を考慮し,最適なロボットハンドの位置・姿勢を自動で探索する処理を行います.
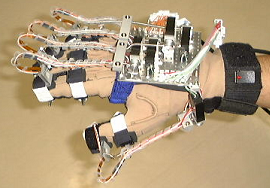
FFG Ver.2
FFG Ver.1の問題点を解決するために, 重量物が集中するアクチュエータ部を手の甲から腕に移し手首から先の疲労軽減を狙う形状に変更しました.(手の甲120[g],腕390[g],総重量510[g])しかし,手首から先の疲労軽減の効果は得られたものの全体として大きく全体重量も増加してしまいました.拇指の機構を改善し拇指の屈曲方向と仮想反力方向を近づけました.また,着脱のしやすさの面では指への固定テープ及び指先部品全体の拡大によって向上が見らました.
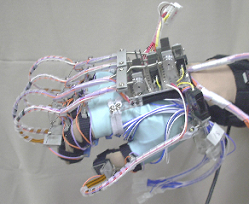
FFG Ver.3
FFG ver.2の問題を解決するために,力覚提示点数を10ヶ所から5ヶ所に変更しました.この理由として,グローブ型の力覚提示装置では,機構的に指の根元を引っ張るのは困難であるからです.その補いとして,どの場所でも同じ感覚を与えることができる振動モータを用いました.さらに,金属製フレキシブルチューブをスパイラルチューブに通し柔軟なリンク機構を形成しました.これにより,FFG ver.1,FFG ver.2の問題である指先部の機構の絡まりを防ぐことができました.また,重量の面でも255[g]と大幅に軽量化でき,長時間使用の疲労も軽くすることができました.メンテナンス性や着脱性も向上しました.
FFG Ver.4

FFG ver.3からの改良点として振動モータを22個に(指に4個,掌に18個)増やしました.掌部分に19個の振動モータを等間隔に付けることにより明確な振動感覚提示が可能になりました.
また,FFG ver.3ではフレキシブルチューブが指の先端に近くかなり指を曲げないとワイヤを引っ張ることができませんでした.そこでFFG ver.4ではフレキシブルチューブを第2関節までにし,少し曲げただけでワイヤが引っ張ることができるようにしました.ただし小指に関しては間隔が狭いせいであまり効果はありませんでした.また, FFGのプラットホームを削り軽量化を図りました.