生体信号ロボティクス
ヒューマンフレンドリーなロボットシステムとして,生体信号を用いたロボット操作インターフェイスを研究しています.
人間が発する生体信号には,脳波(EEG)や筋電信号(EMG),眼電信号(EOG)などがあり,
人間の感情や疲労,筋肉の収縮強度や注視方向など,外部のセンサでは計測が困難な情報を含んでいます.
このような生体信号を用いて,人間の意志や意図などの深層情報を反映できるロボットシステムの開発を目指しています.
sEMGによる指関節角度推定の研究
人間の器用で巧みな手指動作をヒューマノイドロボットハンドに行わせるため, 人間の前腕部から計測する表面筋電信号(sEMG)から,その時の指関節角度を推定するシステムを研究しています.
sEMGから手指の状態を推定する従来の研究では,パターン識別を得意とするニューラルネットワークが広く使われています.
固定された手指のパターンを識別するより,手指の関節角度を推定する方がロボット操作インターフェイスとして汎用性が高いのですが,
従来のニューラルネットワークではsEMG-指関節角度システムのダイナミクスをうまく表現できず,推定精度が不十分でした.
そこで,従来のニューラルネットワークシステムに,時間遅延要素とフィードバックループを設けることで,
システムのダイナミクスを考慮できるように拡張しました.
その結果,従来の推定システム(図中Type1)と比較して,精度良く指関節角度を推定することができました(図中Type2).

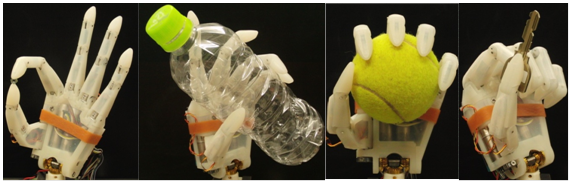
装飾性と機能性の両立を目指した筋電義手の開発
日本国内における筋電義手の普及率は1[%]程度と低く,普及していないのが現状です. そこで,本研究では使用者・関係者の意見を取り入れた高把持力かつ軽量で手首に2自由度を有する筋電義手の開発を行っています. 開発した筋電義手は300[g]以下と軽量でありながら20[N]以上の高い把持力を発揮することが出来ます.また,制御回路やアクチュエータを内部に納めることでユニット化しています. さらに,人工皮膚を装着する計画をしており,より人に近い外観と形状・動きを目指して研究を進めています.