上肢リハビリ支援システム

図1 手指上肢リハビ支援システム
脳溢血等の片麻痺患者を対象として、患者自身の健康な手(健側と呼ぶ)を用いて麻痺側(患側と呼ぶ)の手と上肢のリハビリを行う「手指上肢リハビリ支援システム」(図1参照)を研究開発しています.
患者は,健側に手指の関節角度を計測するデータグローブをはめ,患側の手をバンドによりリハビリ支援機構に取り付けて,CG(コンピュータ・グラフィックス)と音声のガイドに従ってリハビリテーションのメニューを実施します。なお,メニューには果物をつかむ,じゃんけん,コッブを持ちその中のものを注ぐ,ピアノを弾くなどがあり,楽しみながらリハビリテーションができるように工夫されています.この間に,運動中の患側の関節可動範囲や関節速度が自動的に計測され,機能回復の様子が定量的に表示されます.このような,多自由度の手指上肢リハビリ支援システムの開発は世界初です.
本システムの特徴は,
- 各関節の個別の動作や手と上腕の協調運動の訓練が可能であるので,日常生活に必要な物を摘む動作やコップの水を注ぐ動作等の機能回復訓練ができ,QOL(Quality of Life, 生活の質)の向上が期待できること
- CGと音声によるガイドにより,訓練の苦痛を和らげ,楽しみながらリハビリテーションができるように工夫されており,触覚,位置覚の患側刺激に加え,CGによる視覚的刺激により患側動作の動機づけがなされるので,自発的患側運動が促進され,治療の有効性が上がると期待できること
- 患者に対して,リハビリテーションにおける運動データの履歴を表示することで機能回復の程度を定量的に示すことができ,患者の機能回復意欲の向上が期待できること
- 患者自身の健側の手を動かすことにより患側の手の模範となる運動を生成する(セルフモーションコントロール)ので,その運動は関節可動域内となり,痛みを感じた時には運動を患者自身が止められるという安全性を有していること
などが挙げられます.
本リハビリ支援システムは,平成19 年8 月から平成20 年3 月に渡り実証試験(実証試験リーダ 岐阜大学医学部教授 西本 裕)を,岐阜大学医学部附属病院(責任者 医学部教授 西本裕),岐阜中央病院(責任者 リハビリテーションセンター・センター長 安倍 基幸),及び岐阜赤十字病院(責任者 整形外科部長 栄枝裕文)において実施する予定です.これにより,本リハビリ支援システムの有効性が実証できれば,第一段階として健康支援システムとして実用化を目指す予定をしています.
これらの内容は,平成19年7月17日(火)にマスコミ向けに公開デモンストレーションを行いました.
遠隔手指リハビリテーション支援システム
セラピストが都心部に集中し,過疎地に住む場合には周囲に十分なリハビリテーション施設がない場合もあります.
そこで,手指遠隔リハビリテーションシステムを研究開発しています.
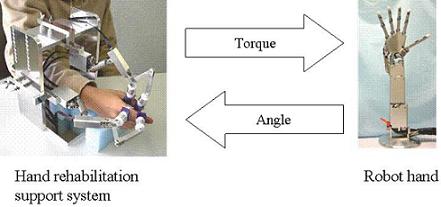
このシステムは手指リハビリテーション支援システム,人間型ロボットハンド,遠隔モニタ部から構成されます.
医師やセラピストが患者の手の動きを模擬する人間型ロボットハンドを操作することで,
患者側に設置された手指リハビリテーション支援システムを介して患側の運動が生成され,
遠隔地からリハビリテーション運動が教示できます.
同時に,患者の機能回復状態をロボットハンドの動作とモニタ表示により医師やセラピストに提示することができます.