ハプティックインターフェイス
VR技術は医療分野での手術や診断のように,気軽には行えない特殊技術の訓練に利用されはじめています.
このときVR空間とのインタラクションにおいては,人間の複数の指先に力感覚を提示する触覚インターフェイスが必要となります.
本研究室では,操作空間が広く,仮想物体の重量感が提示でき, 操作者に圧迫感や装置の重量感を感じさせることのない,
安全な多点ハプティックインターフェイスを開発しています.
「ハプティック」:触覚の,触覚に関する.
両腕多指ハプティックインターフェイスの衝突回避制御

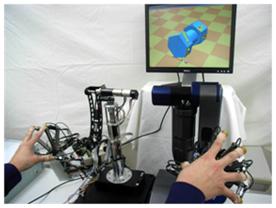
これまで,5指に3軸方向の力覚を提示可能なハプティックインターフェイスを2台用いて,人間の両手10指に3軸の力覚提示可能な両腕システムを開発してきた. 両手を用い,仮想環境において作業を行う場合,操作者はVR画面を見ながらデバイスを操作するため,デバイスに意識が向かなくなる. そのため,2台のデバイスが衝突する可能性がある.衝突は操作者に危険・不安を与えるため,操作中の衝突は回避する必要がある. 本研究では,両腕多指ハプティックインターフェイスシステムの衝突回避法の提案を行っている.
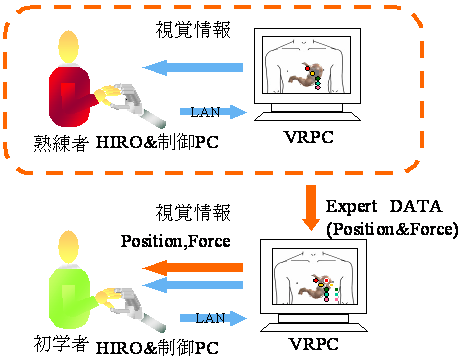
5指の指先位置・力情報の伝達方法
熟練者の5指の指先位置,及び指先力情報の伝達方法を研究している. 初学者に伝えたい力情報は,保存しておいた熟練者の力Feと,初学者が提示物体に加えている力Fbの2種類である. そこでFeを200[ms]間,Fbを500[ms]間サイクルで交互に提示することによって2種類の力の伝達を可能としている(a). また,指先位置は熟練者の手の映像を半透明にして提示することで伝達している(b)
|
|
|
| (a) Transfer Method of the Position | (b) Transfer Method of the Force |
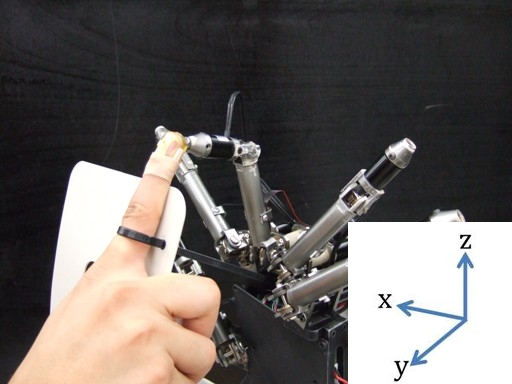
対向型多指触覚インターフェイス(HIRO)の研究
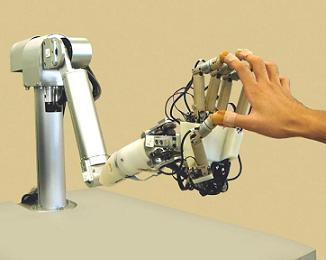
ハプティックインターフェイス(HIRO)はアームと複数の触覚指から構成されます.
アームおよび指はそれぞれが,操作者の腕および指の動きに連動して動きます.操作者の指先は,ハプティックインターフェイスの先端と接触し, また個々の触覚指の力制御により操作者への力の提示を行い,指先に力感覚や触感覚を与えます.
3指のハプティックインターフェイス試作を経て,現在は人間の5本指に合った5指のハプティックインターフェイスを製作しました.
柔軟物体の触覚や,ネットワークを通じて複数のハプティックインターフェイスを用いた協調作業などを研究しており,
また,その応用として触診などの医療訓練への応用,物体操作の技能伝達の研究も行っています.
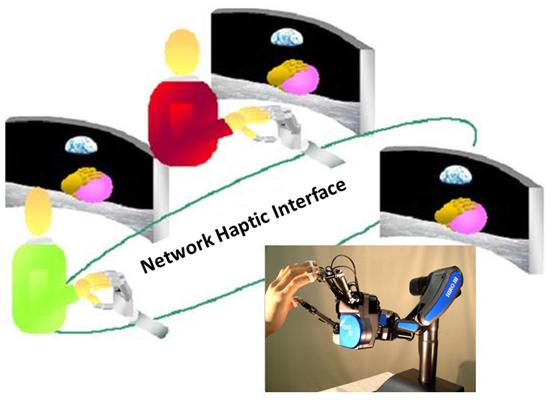
ネットワークハプティックインターフェイスの研究
(総務省(情報通信政策局)からの受託研究)
研究の背景・目的
触覚の通信は次世代通信の大きな課題です.人間の複数の指や掌に力覚を提示できるネットワークハプティックインターフェイス技術の確立により,ヒューマノイドロボットの遠隔操作,製造業における触感,3次元CAD,製造現場における熟練技能の記録と伝達,医学教育における触診訓練システム,医療における遠隔検診・治療,福祉における遠隔介護と,様々な分野で応用が期待できます.
研究開発の内容
多指ハプティックインターフェイスは,アーム機構,ハンド機構,制御装置,インターフェイスソフトウェアから構成されています.そこで,基本技術 として,多指ハプティックインターフェイス機構の最適設計技術,人間の感性を考慮した冗長多自由度制御,省配線制御装置,遠隔間での触覚の共有技術, ハプティックバーチャル環境技術等を大学と企業との産学官連携で研究推進します.
触覚レンダリング
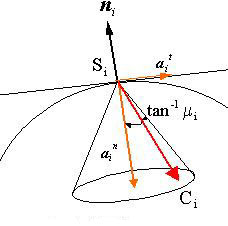
仮想空間において複数の指により物体を操作するとき,指と物体との接触で生じる接触力の影響を受けて物体は空間運動をします.指先が物体に与える力は,指先が仮想物体への進入量により計算される物体表面に垂直方向の抗力と物体表面の接平面上にある摩擦力から構成されます.
指と物体との接触により生じる摩擦には,滑りの無い静摩擦状態と滑りのある動摩擦状態があります.静摩擦と動摩擦との両者の切り替えを行う方法には,摩擦錐を用いたアルゴリズムを用いています.
この方法では,仮想物体への指の進入量に比例した復元力が摩擦として作用し,物体内の進入点が摩擦錐の外部にある時は物体と指先との間に滑りが生じるものとしています.
また,把持している物体の姿勢が変化した時,指先での法線まわり回転で生じる摩擦モーメントについての計算法についても提案しています.本研究では,これらの考え方を包括した物理シミュレーションの作成及び,ハプティックインターフェイスを用いた力の提示について研究しています.
|
|
| 摩擦錐 | 物理シミュレーションの例 |
ファイルはZIP形式で圧縮されています。
ダウンロード後,softwareフォルダ内のHIRO_Demonstration.exeで実行することができます.
(Windows XPにて動作確認済)
その他詳しくはmanualフォルダ内の各ファイルをご覧ください.
HIRO_Demonstration_ver1.0.zip[2.33MB]
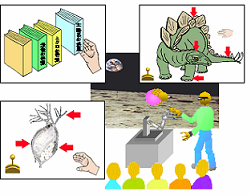
未来科学百科事典
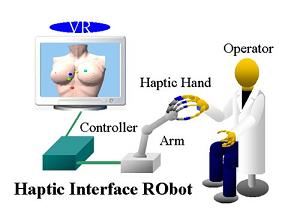
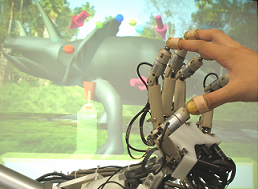
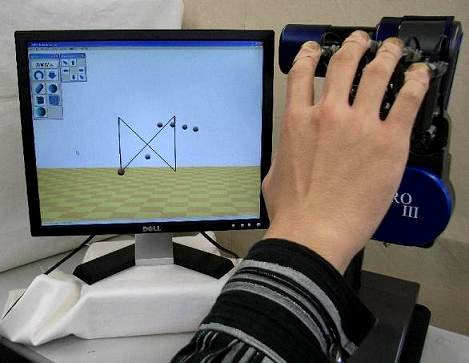
これまでの百科事典は視覚的または聴覚的な情報しか提示できませんでした. しかし,人間の5本の指先に手触り等の力感覚を提示する対向型多指ハプティックインターフェイスロボットと VR(Virtual Reality)技術とを統合することで, 調べたい対象物の重さや手触りなどの力覚を体感できる百科事典を本研究室で研究開発しました.
|
|
| 未来科学百科事典 | HIROによる操作 |
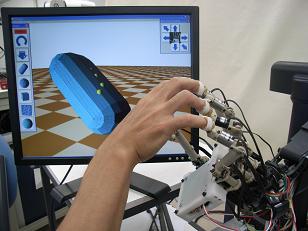
操作者の指先を触覚指と連結し, 操作者が手を動かすことでハプティックハンドがコンピュータグラフィックス(CG)と連動して動作します. 操作者はVRシステムからスクリーンに投影される立体視映像を見ながらHIROを使用して, 仮想空間における物体の触感を体験することができます.
複数の道具を扱うハプティックス
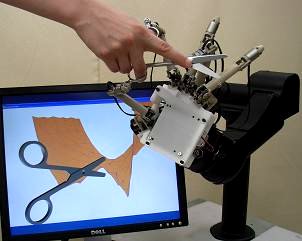
1つの道具を使い目的の作業を行うときの力覚を提示する道具型インターフェイスの開発が行われています. しかしこれらは一種類の道具使用感しか提示することができません. 多種の道具を使う状況において操作者に力覚を提示するには, 道具の数だけ道具型インターフェイスを用意しなくてはならず,機器がかさみ,システムも高価になります.本研究室では, 開発している対向型多指ハプティックインターフェイスHIROに道具デバイスを着脱させることで 複数の道具使用感を提示するインターフェイスとして活用します.
|
|
| はさみデバイス装着時 | その他のデバイス |
技能伝達システム
現在,医療の現場では,安全面などの理由から, 医学生が実際の患者さんに対して触診などの医療行為を行う事が難しく,
実際的な経験がつめないといった問題点があります. そこで,本研究室では,仮想空間上に人体モデルを提示し,
対向型多指ハプティックインターフェイス(HIRO?U)を用いて仮想空間上に提示した
人体モデルに触れた感覚を知ることができる技能訓練システムを開発しています.
また,仮想空間内で訓練を行うため,熟練した医師の作業内容をデータとして記録することができ,
初学者がそのデータを模倣するように訓練を行うことで 従来より効率のよい技能の習得ができると考えられます.
HIROを用いた知覚計測について
熟練者の力の操作を記録し初学者に提示する技能伝達システムを開発するにあたり,人間の力の知覚能力を知る事は重要であり,
人間の知覚能力に基づいてVR訓練システムを開発する事が必要とされる.
人間が操作する力は,力の方向と大きさの2つで表わすことができる.
そこで,VR空間上における提示力の方向に対する知覚能力の絶対誤差と相対誤差、および力の呈示時間の変化による影響を調べている.
ダイナミクスを考慮したハプティックインターフェイス制御
ハプティックインターフェイスはより高精度な力の応答性や追従性が求められます.
そこで本報告では多指触覚インターフェイスHIROの性能向上を制御の観点から目指しました.
考案した制御方法は従来の制御則に動的補償項を加えた制御方法です.
動的補償項はニュートン・オイラー法によりArmからHaptic Fingerまでを考慮して算出しました.
この制御法により従来の制御法よりも提案手法の方がHIRO操作者への追従性が向上し,目的を果たすことができました
両腕ハプティックインターフェイス
人は日常生活や何か作業をする際に,一般的には両手を使用する.
両手を用いることによりVR環境での作業幅は大きく広がり,実行できる作業が増すと考えられる.
特にVR環境において両手で精巧な作業を実行するためには,指先に高精度な力を3方向に提示する必要がある.
そこで,本研究では,人間の5指に3次元の任意の力を提示できるハプティックインターフェイスHIROIIIを2台用い,
VR環境で両手作業を行える両腕ハプティックインターフェイスシステムを構築し,その有効性を検討する.