
ロボットハンド
ロボットによる器用な作業の実現にむけ, 人間の手に似た16自由度20関節の人間型ロボットハンドを開発しています. ハンド制御法,分散型触覚センサ,ハンドの遠隔教示などの研究として, 将来的には研究用のプラットホームとなることを目指しています.
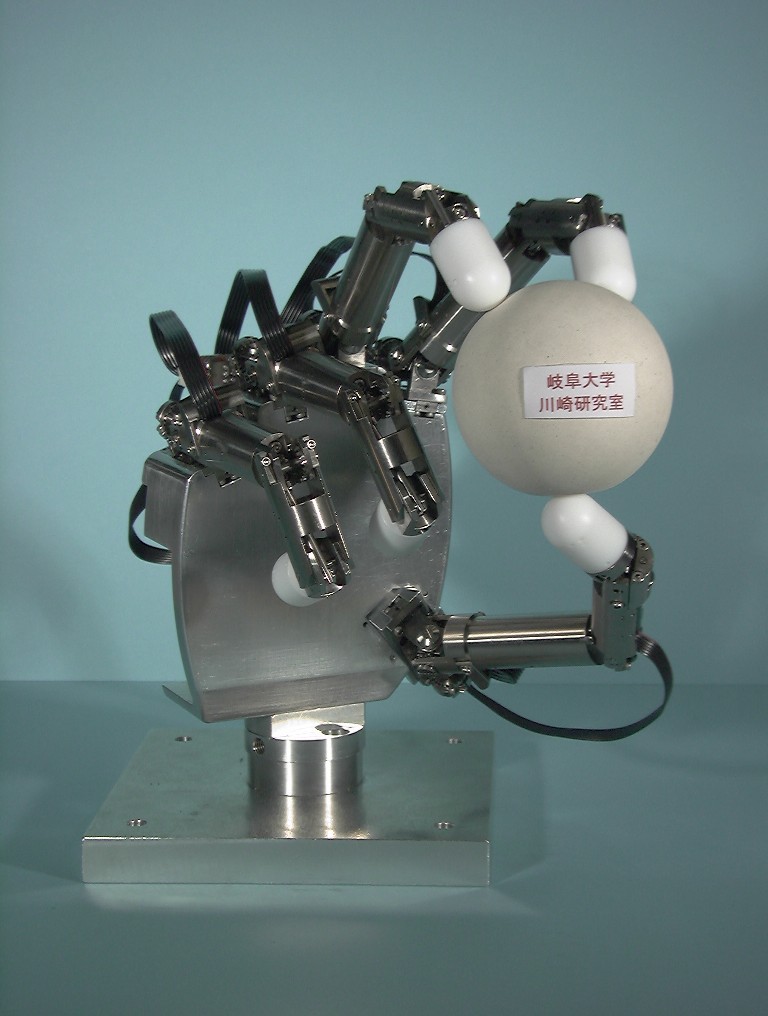
人間型ロボットハンド Gifu Hand
人間の行う複雑多様で器用な操作を実現させるため
人間型ロボット・ハンド「岐阜ハンド」の研究開発を行っています.
岐阜ハンドは、人間に代わって物体の把握と操作が実現できるよう,
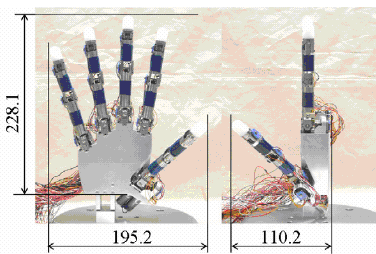
大きさばかりでなく,幾何学的にも運動機能的にも人間の手に近い形としています.
指数は5本であり,人間の指関節と同様の関節数と自由度を設けています.
母指(親指)は4自由度4関節を有すします.器用な操作が可能となるよう,
人間と同様に母指が他の指と対向するように設計しました.
母指は他の指より器用さが求められており,全ての関節が独立に動くようになっています.
指先の力も他の指よりも大きく,モータのトルク配分もそれを十分に考慮にいれています.
一方,他の指は,3自由度4関節を有する.人間の指と同じように,
第1から第3の関節は独立して動き,第3関節と第4関節はほぼ連動して動きます.
全ての指の第1関節と第2関節はほぼ直交させ,また掌側の2つの関節軸を直交させることで,
人間の指に類似した運動を可能としました.
5本指すべてをあわせると計16自由度20関節に達します.


指および掌部内側には試作した626点の分布型触覚センサが装着でき,また指先には市販の6軸力覚センサが取り付け可能です.
このように,指先に6軸力センサ,指腹部や掌に分布型触覚センサを合わせもつハンドの研究は他に例の少ない研究です.
市販のロボットアームに容易に装着できるように,ロボットハンドはサーボ・モータ内蔵方式としています.
この方式は,ワイヤ・ロープを通して関節を駆動するタイプのハンドに比べ汎用性が高く,またワイヤーによりアームの運動を制限することもありません.減速機や伝達系を高剛性とするため,小型衛星歯車減速機等を通して各関節を駆動します.
岐阜ハンドは,将来,物体把持や器用な操作に関する研究において,ロボットハンドの標準型として用いられることを想定しています.
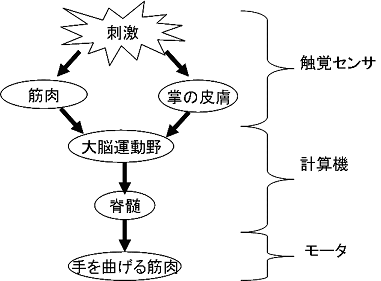
握り反射を模擬した物体の把持
人間は生後数ヶ月の間,手や掌に物体が触れると, 物体形状を知らずとも指を屈曲させギュッと握りしめます. さらに,握った物体を引き離そうとするとさらに力強く握りしめます. これらの動作は握り反射と呼ばれ,乳児が生き残るための重要な動作の一つです.しかし,物体形状を知らなくても触覚のみで物体を把持することができます.そこで,この握り反射の技能を,分布型触覚センサを装着した人間型ロボットハンドGifu Handで実現して様々な形状の物体把持を試みています.
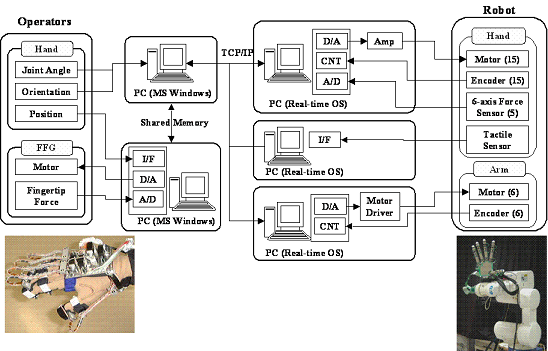
人間型ロボットハンドの遠隔操作
当研究室ではロボットハンドを人間の手の動作に合わせて操作するため, 下図のようなシステムを構築しています. 人間の手の位置・姿勢は3次元位置・姿勢センサを, 指の角度情報はデータグローブを用いて計測して人間型ロボットハンドや ロボットアームを自由に操作することができます. また,操作者の手にはFFG(VRロボット教示で紹介)を装着し, 遠隔地においてロボットハンドが感じた力情報を操作者の指先だけでなく, 指腹部や掌にも提示することが可能です. これにより硬い物体から柔らかい物体まで様々な物体を把持して操作することが可能となります.
リハビリテーション教育・訓練用ロボットハンド
セラピストを目指す学生がリハビリテーション技能を効率よく修得することを目的とし,関節が自由に動かない患者さんを模擬するリハビリテーション教育・訓練システムを研究開発しています.特に日常生活に欠かせない手指に着目し,ハンドとアームを小型化,高出力,多自由度,高剛性,可搬性を設計コンセプトとして開発を進めています.このシステムは熟練したセラピストと学生とのリハビリテーション技能を定量的に比較・評価でき,リハビリテーション教育の初期段階において効率的な学習が期待されています.
(文中の単語をクリックすると説明Q&Aにジャンプします)

<<<リハビリテーションQ&A>>>
| Q1. | セラピストとは? |
| A1. | 患者さんにリハビリを施す医師(療法士)のことをいいます. |
| Q2. | セラピストを目指す学生とは? |
| A2. |
セラピストの資格を得るために勉強している学生などをいいます.
学生は主にリハビリの知識について学びます.
多くの学校では患者さんに対して手指へのリハビリ実習は行っていないそうです.
従って,リハビリ技能の修得は病院などで先輩セラピストの指導の元,実践的な経験を積む必要があります. |
| Q3. | リハビリテーションとは? |
| A3. |
関節が自由に動かない患者さんに対し,
適切な運動を与えることで少しでも関節を自由に動かせるようにする治療方法のことをいいます.
動かないからと無理に力を加えると関節回りの組織(腱や筋,骨など)に大きなダメージを与えてしまい,
逆に動かさないでいると筋肉が縮んでより動かなくなります.
また関節が動かなくなってから一定期間以内に訓練すると回復が早いといわれています. |
| Q4. | リハビリテーション技能とは? |
| A4. |
リハビリテーションを適切に患者に施すことが出来る技能を言います.
A3で述べたように,リハビリテーションは適切な運動を早期に行うことに意味があるので,
セラピストにとってこの技能の習得はかかせません. |
Gifu Hand の開発動機と経過
平成8年度に,(株)ダイニチが岐阜県研究開発財団の産学共同研究支援の助成を受け,川崎研究室,歯車製造専門企業の岐阜ギヤー工業(株)と”岐阜ロボットハンド研究会"を組織し,ロボットハンドの開発動向の調査を行いました.その結果,
1)国内外で人間型ロボットハンドの製品は市販されていない,もしくは十分な機能がない.
2)国内外で研究用ロボットハンドの需要が見込める.
3)サーボモータ内蔵のハンドでは,減速機,機構部品の特殊精密加工技術が必要で参加企業の特色が生かせる.
などの調査結果を得ました.二本指ハンドの試作を行い,ハンド開発における課題を明確にしました.

二本指ハンド(1997)
平成9年度に,岐阜県研究開発財団の助成を受け,
1. モータ内蔵方式で大人の手のサイズ
2. 人間の腕と同程度の大きさのロボットアームに装着できる
3. 力センサ,分布型触覚センサが装着可能
の三つを開発目標として,5本指のGifu Hand Iを試作しました.
本ハンドは,市販の6軸力センサが装着でき,
研究用プラットフォームとしてのポテンシャルを示しましたが,
減速機構のバックラッシュや軸受け部の磨耗が大きいという問題がありました.

Gifu Hand I (1998)
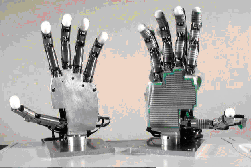
平成10年度に,左右のGifu Hand IIを試作しました.
本ハンドは,フレームをアルミ材からチタン材に変更し磨耗の低減をはかり,歯車のバックラッシュも設計見直しにより低減し,2節で述べた諸特性を持つようになりました.
平成11,12年度は,Gifu Hand IIの特性評価を行うとともに,
商品モデル化を目指してさらに改良を進めました.
本研究会に,ニッタ(株)が参画して,分布型触覚センサの開発にも着手しました.
Gifu Hand II (1999)
平成13年度は,Gifu Hand IIIと859点の分布型触覚センサを開発しました.Gifu Hand IIIは,運動性能として,周波数応答特性は人間の手を上回ります.力性能は十分ではないが,研究開発用ツールとしては十分な性能を有すると判断し,平成13年12月より(株)ダイニチより販売を開始しました.
平成14年度から,2本のケーブルで信号とパワーの送受信できる省配線システムを研究開発し,その研究成果は国際会議WAC2004で講演発表し2006年にBest Paper賞を受賞しました.

Gifu Hand III (2002)
平成15年度には,ロボット手話等に役立てるために,フレームをエンジニアリング・プラスティック化により軽量化・小型化を図った重量0.8 kgのKH Handを開発し,同時に895点の分布型触覚センサを開発し,平成16年度から販売を開始しました.同時に,平成15年度以降は,ハンドを手指リハビリに役立てるために,人間の皮膚を被せ,患者の手関節の動きを模擬するリハビリ教育用ハンドや,遠隔での患者のモニターやリハビリ教示に役立てる遠隔リハビリハンドを開発しています.また,ハンドの研究は,多指ハプティックインターフェイスや手指リハビリ支援システムの研究へと発展しています.

KH Hand (2003)
Gifu Hand 開発研究の表彰関係
| (1) | 2002.3 | 2001年度日本機械学会東海支部 研究賞 |
| (2) | 2002.4 | 第14回中小企業優秀新技術・新製品賞, 主催 (財)あさひ中小企業振興団,日刊工業新聞) |
| (3) | 2002.12 | 2002年度計測自動制御学会システムインテグレーション部門 技術業績賞 |
| (4) | 2003.3 | 「モノづくりブランドNAGOYA」本賞受賞,名古屋商工会議所 |
| (5) | 2003.5 | 平成14年度異業種交流成果表彰 優秀製品賞,主催 (財)中小企業異業種交流財団 |
| (6) | 2003.9 | 日本ロボット学会第8回実用化技術賞 |
| (7) | 2006.4 | 平成18年度文部科学大臣表彰(科学技術賞) |
| (8) | 2006.7 | WAC2006(World Automation Congress) Best Paper Award |