Robotics with biological signals
Especially surface EMG (sEMG) is beneficial for human - robot interface. Manifold examples of researched on estimation hand states with sEMG have been done. But most of the research focuses on “the recognition the hand state pattern”. While estimating the finger joint angles has more general versatility for human ? robot interface, estimation error caused without considering the dynamics of the “sEMG ? finger joint angels system”.
A perceptron with three layers was adopted, as a multi - input and multi - output system can estimate finger joint angles.
The perceptron is a feed-forward type of neural network and can approximate input - output function for a given data set after training.
And for dealing with the complicated relationship between sEMG and finger joint angles, a recurrent structure by a feedback stream and time - delay factors for input are integrated into the perceptron. The system can therefore train the dynamics of an estimation system.
Compared with the type 1 network (ordinary system), the type 2 network (proposal system) can better train the dynamics of an estimation system, and the estimation errors with type 2 are smaller than with type 1. In particular, with a type 1 network, wrong motion errors occur when a finger is not being moved or large overshoot errors occur at the transition from one motion to another.
Our goal was to establish a new type of estimating system for finger joint angles.
The system is helpful for humans operating robot hands as well as those with prosthetics, and teleoperating the manipulation.

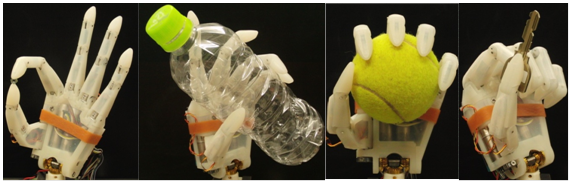
Research on prosthetic hand with exteriority and functionality
In Japan, the penetration of electric prosthetic hands is low, that is around 1%, and hand is not popular. Authors have developed a myoelectric prosthetic hand which has high grasp force and 2-DOF wrist based on a survey of demands for prosthetic hands. The developed prosthetic hand can demonstrate a high grip force over 20N with under 300[g] though it is light. Moreover, it succeeds in making to the unit to connect only LAN cable and the power supply with the outside because the control circuit and the actuator are supplied internally. In addition, the plan to install the prosthetic skin is done, and the research is advanced aiming at externals and shape and movement near the person or more.