Hand Rehabilitation Support System
The number of patients who had a function disability of certain part of the body caused by CVA (Cerebral Vascular Accident) or bone fracture is increasing in resent years. In order to back to normal daily life, these patients need timely and persistent rehabilitation to recover the function ability of that part of the body. Since the number of therapists is not enough for patients (e.g., the number of physical therapists and occupational therapists in Japan are 21 thousand and 10 thousand, respectively), it is not easy for the patient to have long rehabilitation training supported by therapist. A solution of this issue would be to provide a self-performing rehabilitation system that supports the patient to perform the rehabilitation exercise by his/her self.
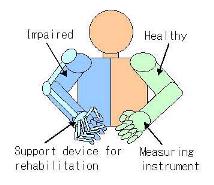
Rehabilitation Support System
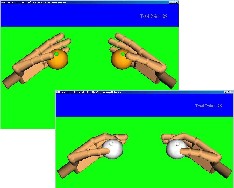
In the developed system, individual finger joint motion of impaired hand is supported to move by an exoskeleton device that is controlled by the finger joint motion of the patient’s healthy hand. Finger motion assistant device supports motions of flexion/ extension of metacarpophalangeal (MP) joint, flexion/ extension of proximal interphalangeal (PIP) joint, and adduction/abduction of finger for each finger. Furthermore, virtual reality (VR) simulation is utilized to incorporate amusement aspect to rehabilitation system. This could prevent patients from getting bored during painful exercise. The evaluation by therapists has shown that the developed rehabilitation system has a high potential for self-performing rehabilitation therapy for hand disabled persons with hemiplegia. We are planning to evaluate the recovery effect of this system by conducting a clinical test on patients.
 |
 |
 |
Hand Rehabilitation Assistant System |
Self-Motion Control |
Training Simulation |
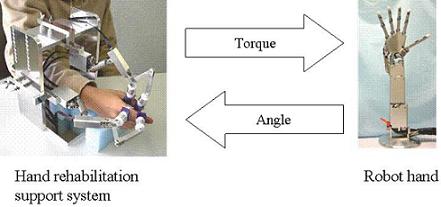
Robot Hand for Education/Training of Rehabilitation
The number of disabled persons is increasing yearly as Japan’s population ages. A therapist creates a rehabilitation program for a patient to aid in his or her recovery and mitigates the patient’s lost abilities. The human hand is obviously very important in the activities of daily life such as taking a meal and opening a door. Students studying to become therapists have few opportunities for repeated training for the rehabilitation of patients. The rehabilitation robot hand system, which imitates contracture joints, is developed in collaboration with doctors and therapists. Contracture joints that caused by the tendon adhesion and require the strongest force in rehabilitation are also modeled. Students work with the robot hand, which in turn quantitatively evaluates students’ rehabilitation techniques via sensors on the robot.


Hand Tele-rehabilitation System
Therapists converge on heart of the city. It reduces the chance of exercising rehabilitation for disabled people in rural areas. Thus a hand tele-rehabilitation system, which plays an active role in the shortage of medical practitioners in under-populated areas, is developed. The system consists of hand rehabilitation support system, robot hand, and remote monitoring system. Therapists use the robot hand imitating a patient hand to make a rehabilitation program. The rehabilitation program instructs the patient via the support system. The benefit of recovering functions is contributed to therapists using the robot hand motion and monitoring system.