![]()
| 2026年度 | ||
| 教授 | 松下 光次郎 | 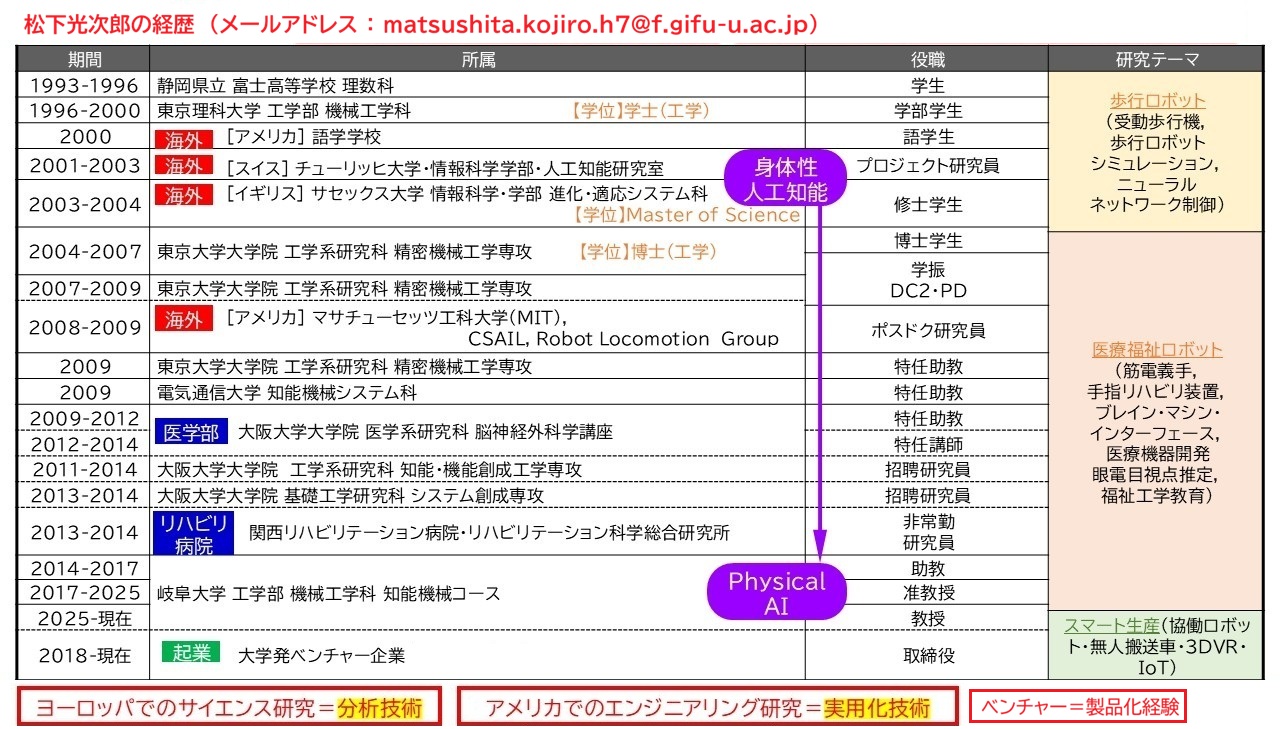 ★画像をクリックで拡大! |
| D3 | 岩田 | 3D動力学シミュレータを用いたソフトグリッパの自動生成(Sim2Real) 松下研発ベンチャー(2社:PoC系,IoT系)の起業&経営 松下研発・学生ベンチャー(下記後輩3社)の起業&経営支援 |
| D3 | Nursyuhada | 歩行解析 |
| D2 | 土山 | 協働ロボット・6軸アームのAI教示効率化 松下研発・自律移動ロボット系ベンチャー起業&経営 |
| D2 | 西下 | 福祉支援システム |
| D1 | 竹内 | 協働ロボット・6軸アームの作業認知AIの実現 松下研発・医療福祉&特別支援教育系ベンチャー継承&経営 |
| M2 | 加藤 | 3DSLAMに基づく生産現場管理 |
| M2 | 篠田 | 3DAR×AI |
| M2 | 中村 | マルチモーダルAIコミュニケーションアプリ |
| M2 | 松本 | 無人搬送車の複数台協調搬送 |
| M1 | 日紫喜 | スマート農業・生育調査デバイス |
| M1 | 稲本 | リムレスホイール型移動ロボット |
| M1 | 八木 | 無線TAGと3DSLAMを組合せたコンテナ管理 |
| M1 | 木村 | ウェアラブル尻尾ロボット |
| B4 | 小西 | 自律脚移動台車 |
| B4 | 竹田 | 3Dスキャナと6軸アームを用いた3D研磨動作の自動化 松下研発・ロボットアームベンチャー起業予定 |
| B4 | 中嶋 | P300ブレインマシンインターフェースによるグリッパ&アーム制御 |
| B4 | 溝口 | 3D動力学シミュレーションを使った脚移動ロボットの自動生成(SIM2Real) |
| B4 | 宮内 | AIを用いた3DSLAM環境地図の効率化 |
| 研究バイト | 佐藤 | スマート農業・生育調査システム 松下研発・農業系ベンチャー起業&経営 |
| 研究バイト | 井森 | ウェアラブル・アシストロボット |
| 研究バイト | 石川 | ブレイン・マシン・インターフェース×3DVR |
| 研究バイト | 池田 | 自律分散制御×ドローン×レスキュー |