
本研究は公益財団法人JKAの「2021年度 機械振興補助事業(2021M-193)」により,実施しました.
微細液滴をバックライト光源により撮影すると図1のように映ります。 図1に示す粒子A,B,Cを見てわかる通り焦点からの距離に応じて粒子はぼやけて映ります。 そのため正しい粒径を測定するためには焦点からの距離に応じた粒子の映り方を定量化する必要があります。 そこで較正実験を行うことを考えました。 較正とは簡単に言うと測定値に対する物差しを作ることです。

図1 粒子のバックライト撮影
図2に較正実験装置を示します。 本装置を用いて電動ステージ上にガラスプレートを設置しその上に多数の較正粒子を載せ、カメラから任意の奥行き位置で撮影を行いました。 本装置により撮影した粒子と同一の粒子を電子顕微鏡により撮影することにより粒径の真値を取得します。 これにより粒子の奥行き位置・粒径・粒子画像のデータベースを構築しました。 このデータベースをもとに適切な画像処理の物差しを作ります。
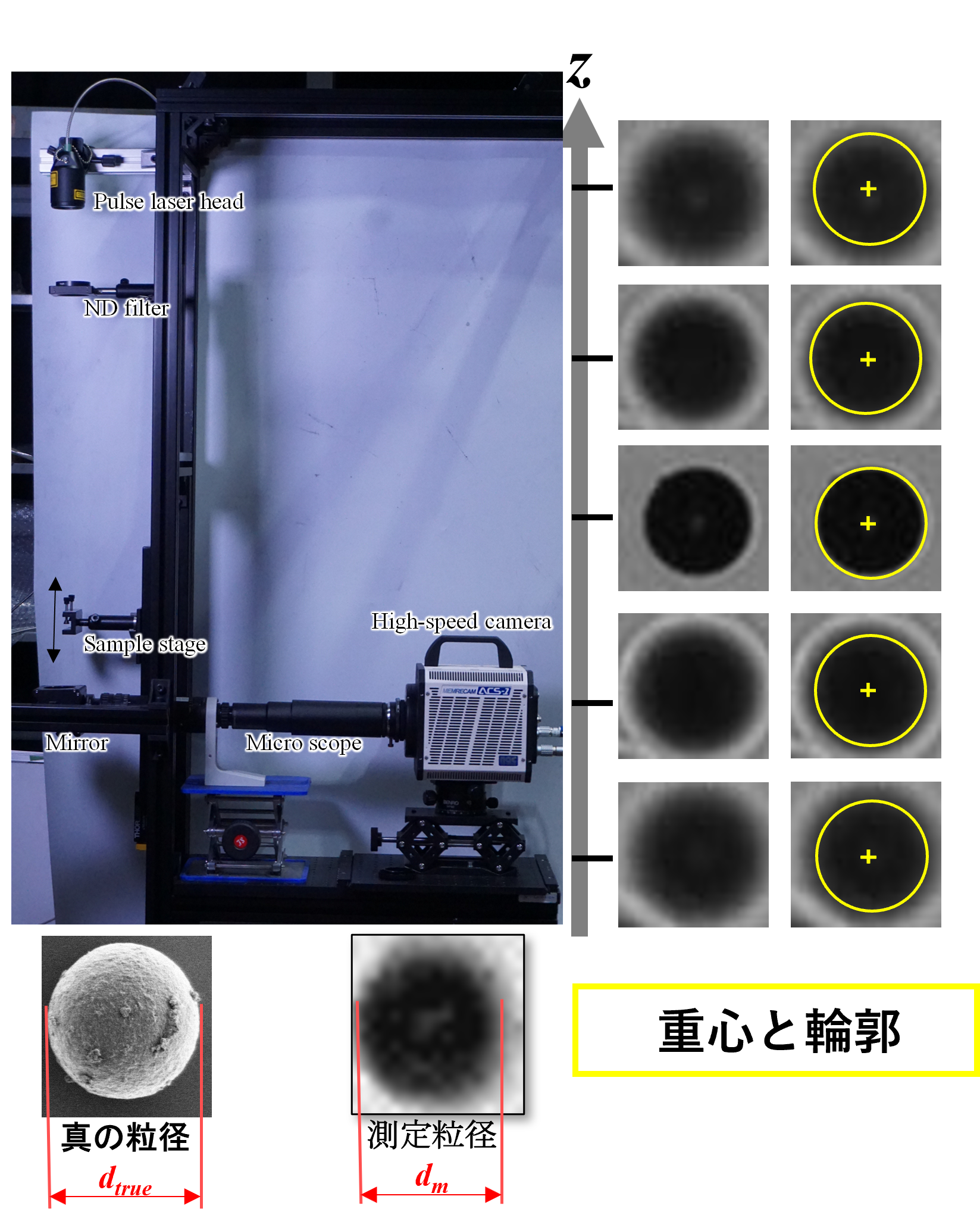
図2 校正装置
モノクロ画像はそれぞれの明るさの指標である輝度情報を持った画素の集合です。
粒子画像に対して図3のように粒子輪郭輝度のしきい値を決めることで粒子輪郭・粒子内最小輝度値を求めることができます。
図4は実際に単一液滴を微粒化させ、長距離顕微鏡と光速度カメラを用いて取得した画像です。
先述した粒子輪郭輝度値を用いて画像処理をすることで、しきい値以上の輝度値を持つ画素は黒、しきい値以下の輝度値を持つ画素は白として表示されます。これを二値化画像と呼びます。
二値化画像に輪郭抽出関数を適用することで図6の陽に輪郭抽出画像を取得できます。
抽出された輪郭の面積から粒径を取得でき、輪郭内の輝度値情報より粒子の奥行き位置を同定します。
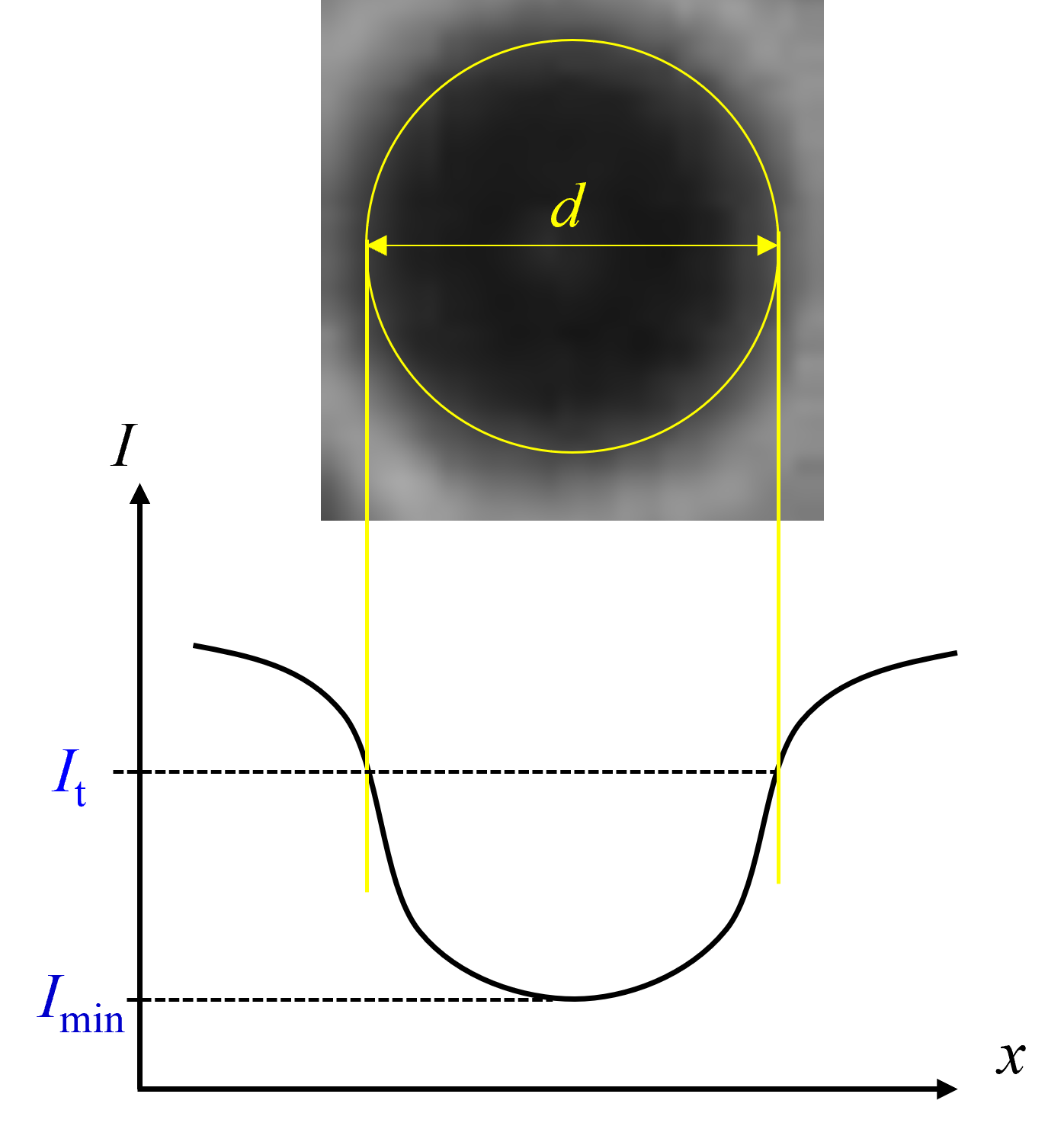
図3 しきい値設定による粒子輪郭抽出

較正実験によって粒径の真値を取得しているため、粒径の真値に最も近くなる粒子輪郭しきい値を図3左のようにプロットすることが可能です。 粒径・粒子の奥行き位置・最適な粒子輪郭しきい値の三次元データに最小二乗法を適用することにより図3左のような粒子輪郭しきい値導出曲面方程式を導くことができます。 同様に図4の粒子奥行き位置同定曲面方程式を導くこともできます。
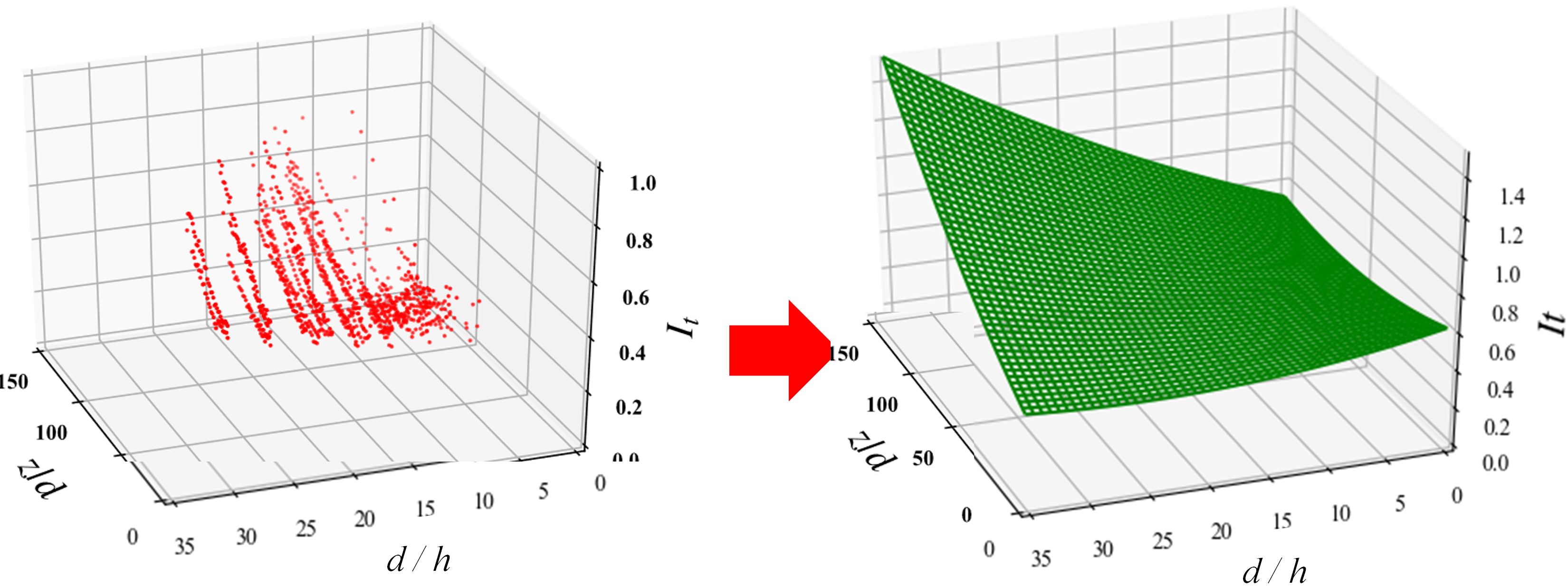
図7 粒子輪郭しきい値決定曲面方程式
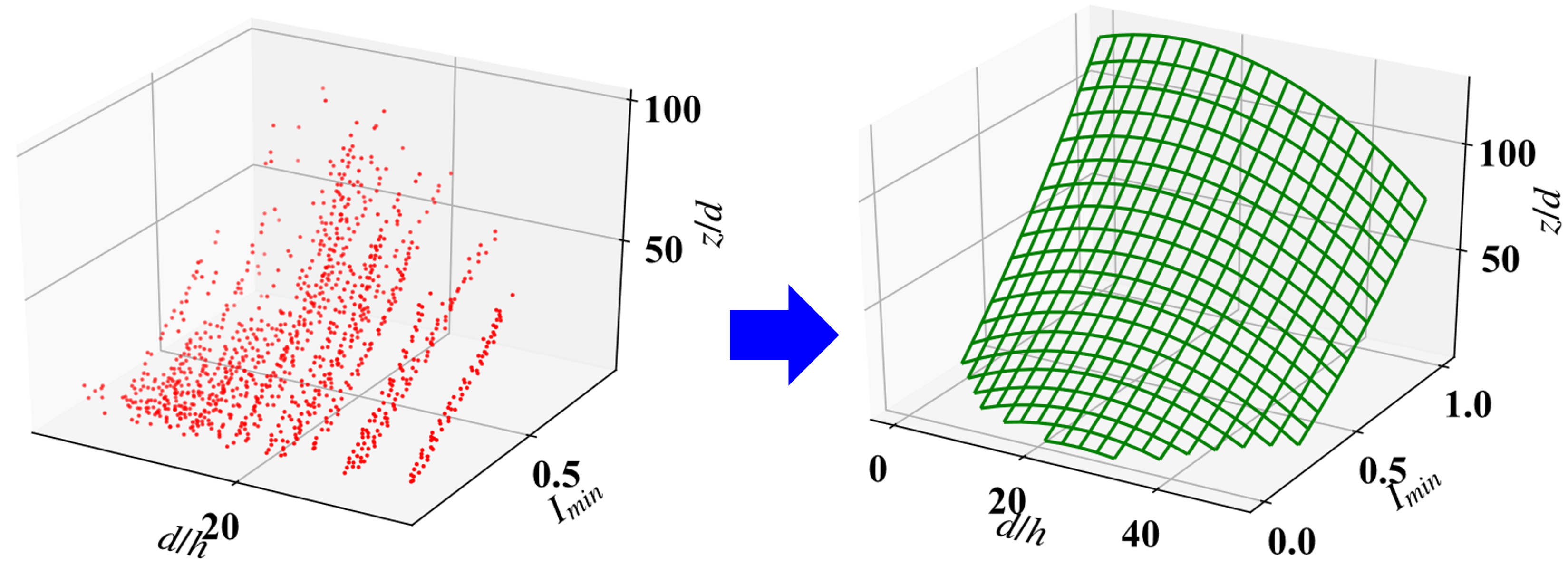
図8 粒子奥行き位置決定曲面方程式
ここで取得した二つの曲面方程式からは代数的に粒径・奥行き位置が求められないため繰り返しによる解の取得法を考えました。
以下のように奥行き位置・粒径が一定値になるまでループさせることにより真に近い解を得ることができます。以下が解析手順です。
①粒子をバックライトにより撮影し粒子画像を取得します。
②粒子画像に粒子輪郭しきい値Itを設定することにより輪郭が決まり、粒径dn,粒子内最小輝度値Imin,nを取得。
③奥行き位置z導出曲面に粒径dn,粒子内最小輝度値Imin,nを代入し奥行き位置znを取得。
④粒子輪郭しきい値It導出曲面に奥行き位置zn、粒径dnを代入し輪郭しきい値It,nを取得。
①~④を奥行き位置z、粒径dが一定値になるまでループさせることにより真に近い解を得ることが可能。
ここまで紹介してきた手法を用いて単一液滴による微細液滴の粒径測定を行いました。
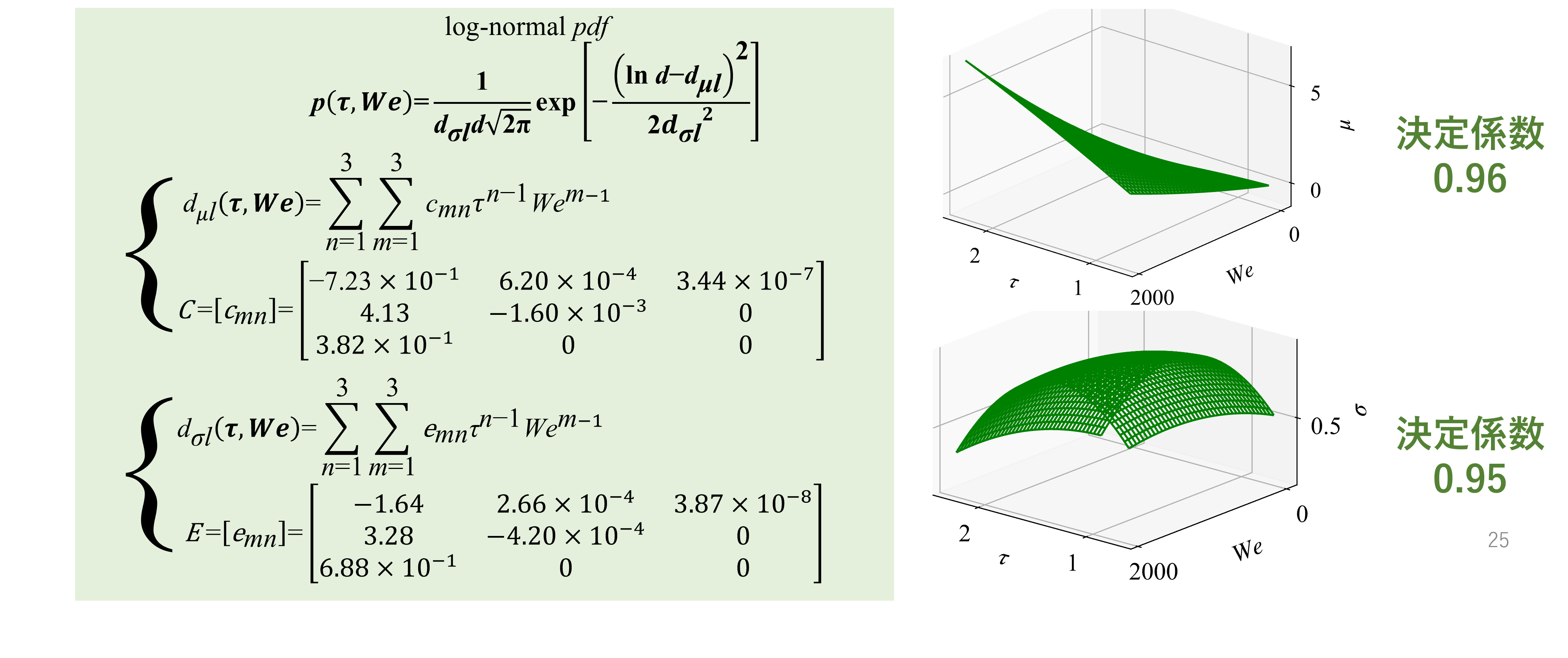
ビッグデータ解析により以下に示す粒度分布予測式を構築しました。
さらに実験を重ねて粒度分布予測式の精度を向上させることにより未知の条件における粒度分布を予測することが可能となります。
Copyright (C) 宮坂・朝原研究室 all rights reserved 2021.
知能機械コースホームページ
人間情報システム工学専攻ホームページ
岐阜大学ホームページ